Orchard path visual navigation method and system based on fuzzy control algorithm and medium
A fuzzy control algorithm and visual navigation technology, applied in the control/regulation system, non-electric variable control, two-dimensional position/channel control and other directions, can solve the problem of low unmanned level, and achieve the effect of driving speed and steering.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
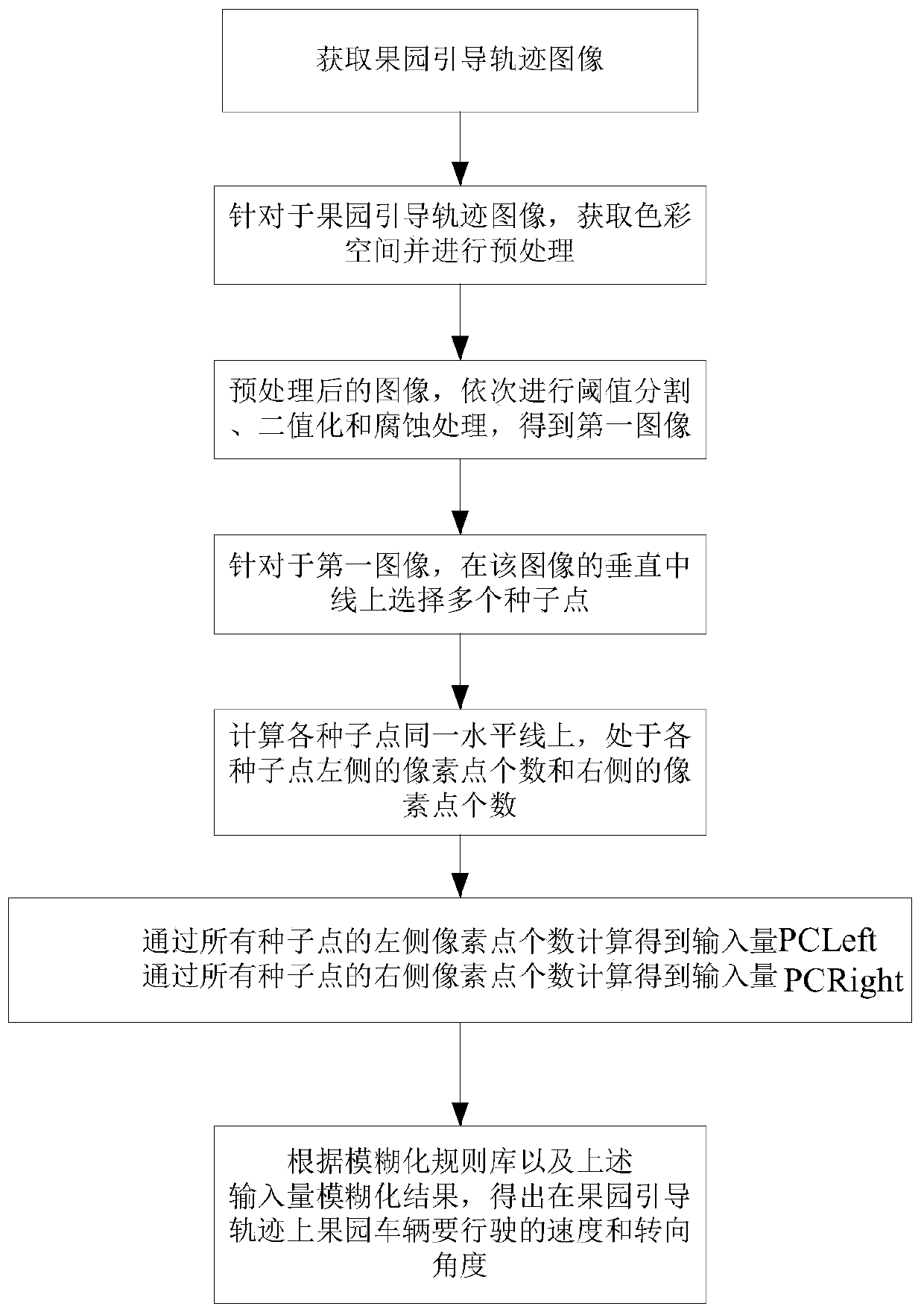
[0064] This embodiment discloses a visual navigation method for an orchard path based on a fuzzy control algorithm, through which the orchard vehicle is guided to drive in the orchard path, such as figure 1 As shown, the specific steps are as follows:
[0065] Step S1. Obtain an orchard guide track image; in this embodiment, the orchard guide track image is captured by a monocular camera, and the monocular camera is set on an orchard vehicle driving on the orchard guide track.
[0066] In this embodiment, the monocular camera used to photograph the orchard guide trajectory path is calibrated through the checkerboard calibration board. In this embodiment, after the monocular camera is calibrated, the skew coefficient is 8.88390, and the average error of reprojection is 0.2222. The matrix A in the camera is as follows:
[0067]
[0068] Tangential distortion coefficient p=[p 1 ,p 2 ] describes the distortion model as follows:
[0069]
[0070] Where p=[0.0024,0.0023] i...
Embodiment 2
[0110] This embodiment discloses a visual navigation system for orchard paths based on fuzzy control algorithms, such as figure 2 As shown, including the controller, image acquisition equipment and corner control system.
[0111] The controller is used to execute the orchard path visual navigation method based on the fuzzy control algorithm described in Embodiment 1; in this embodiment, the controller can be implemented by a microcomputer such as a CPU connected to a memory.
[0112] The image acquisition device is connected to the controller, and is used to send the collected orchard guide trajectory image to the controller; in this embodiment, the image acquisition device adopts a monocular camera, and the monocular camera adopts the orchard guide trajectory image captured by a CCD camera.
[0113] The steering angle control system is connected between the steering mechanism of the orchard vehicle and the controller, and is used to obtain the steering angle information of t...
Embodiment 3
[0120] This embodiment discloses a storage medium, which stores a program. When the program is executed by a processor, the fuzzy control algorithm-based orchard path visual navigation method described in Embodiment 1 is implemented, as follows:
[0121] Step S1, obtaining the orchard guide trajectory image;
[0122] Step S2, for the orchard guide trajectory image, obtain the color space and perform preprocessing;
[0123] Step S3, for the preprocessed orchard guide trajectory image, sequentially perform threshold segmentation, binarization and erosion processing to obtain the first image;
[0124] Step S4, for the first image, select a plurality of seed points on the vertical center line of the image; calculate the number of pixels on the left side of each sub-point and the number of pixels on the right side of each sub-point on the same horizontal line number;
[0125] Step S5, calculating the input amount PCLeft by calculating the number of pixels on the left side of all ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com