

Device and method for taking and holding cups through mechanical arm
A technology of manipulators and cups, applied in the field of robotics, can solve the problems of difficulty in popularization, large floor space, and many batching stations, and achieve the effect of continuous cup taking and cup holding, high degree of automation, and simple principle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
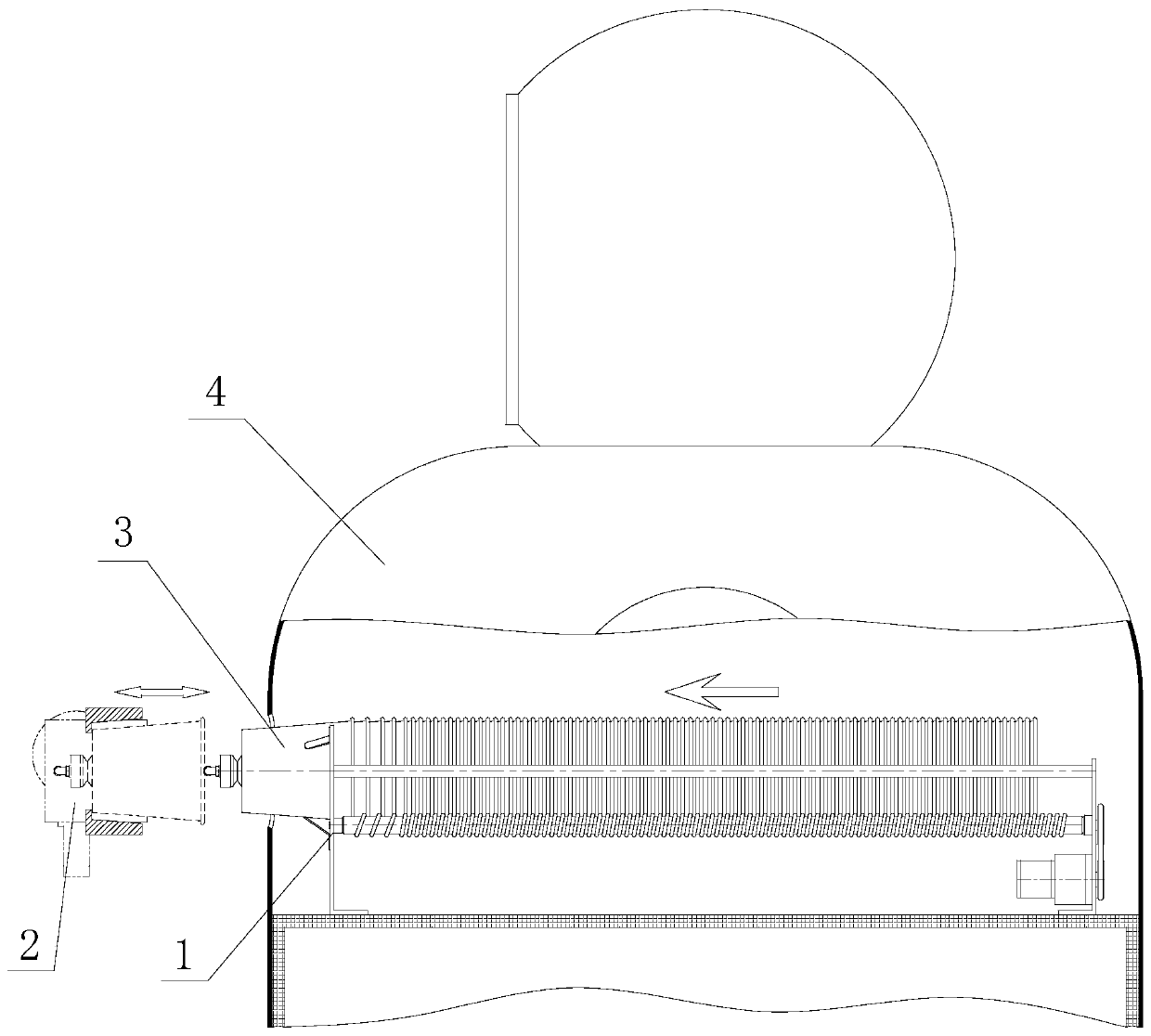
[0045] This embodiment is a cup-holding device with a manipulator, which is applied to a pouring-type beverage supply robot, such as figure 1 As shown, it is mainly composed of a cup divider 1 and a cup grabbing robot 2. The specific structure of each component is as follows:
[0046] 1. The structure of the cup divider:
[0047] The cup divider is mainly used for separating and extracting disposable paper cups or plastic cups. It can continuously and automatically decompose nested cups and take them out one by one.
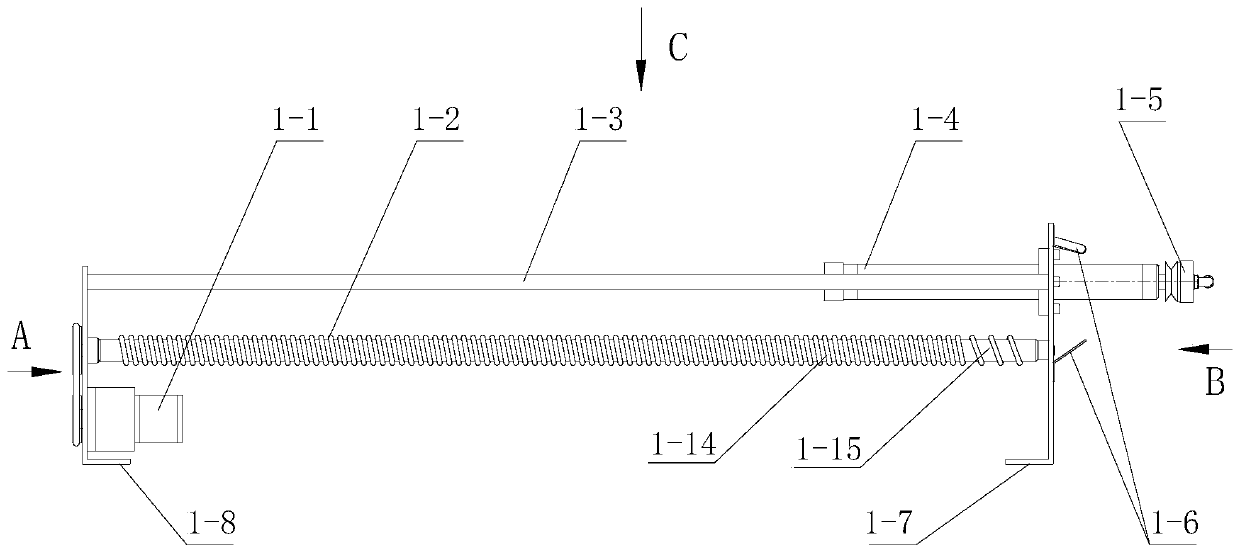
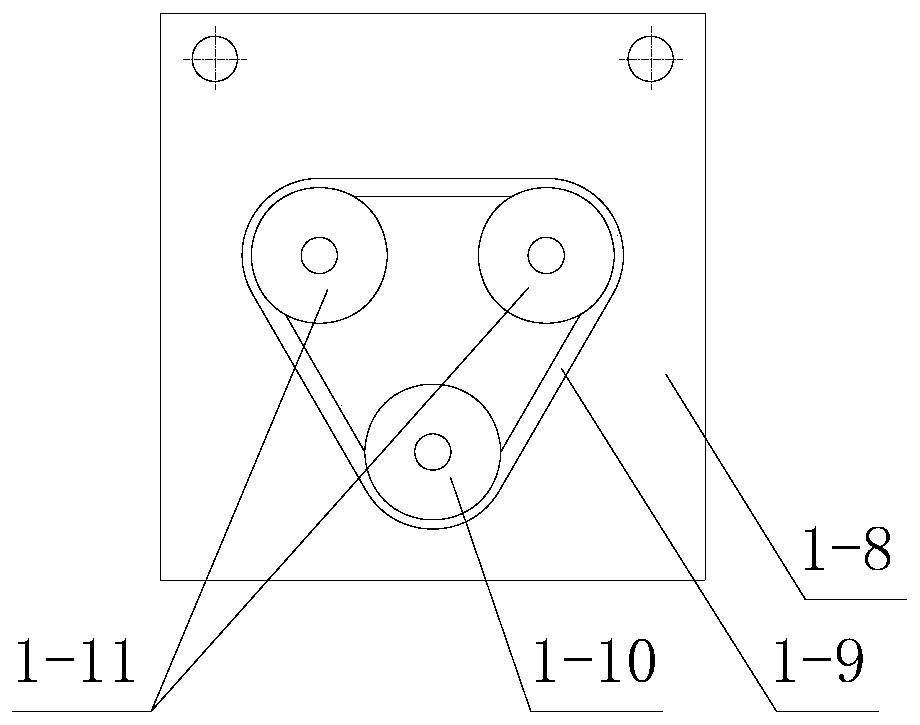
[0048] Such as Figure 2 to Figure 5 As shown, the overall arrangement of the cup divider is horizontal, mainly composed of a servo motor 1-1, a propulsion screw 1-2, a guide rod 1-3, an extraction electric cylinder 1-4, a suction cup 1-5, and a limit plate 1-6 , right support plate 1-7, left support plate 1-8, drive belt 1-9, first pulley 1-10, second pulley 1-11 and connecting rod 1-12 form. Among them, the servo motor, the propulsion screw, the guide rod, ...
Embodiment 2
[0060] This embodiment is a method for taking and holding a cup with a manipulator, which is applied to a pouring-type beverage supply robot, and is realized by the device described in Embodiment 1. The specific process and working principle are as follows: figure 1 or Figure 12 As shown, the details are as follows:
[0061] Cup divider is installed in the body of robot 4, and horizontal layout, its left support plate is close to health back, and right support plate is close to health chest. There is a round hole in the chest, corresponding to the outlet of the cup body on the right support plate. The cup grabbing manipulator is installed on the arm wrist of the robot.
[0062] During work, the cup body 3 that is nested and formed into a long tube is placed in the screw type cup separation mechanism. For the nested cup bodies, the lower part of the edge of the cup mouth is in contact with the propulsion screw, and the two sides of the edge of the cup mouth are in contact w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More