

Anti-interference control method for singular perturbation system
A technology of singular perturbation and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc. The effect of stickiness and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
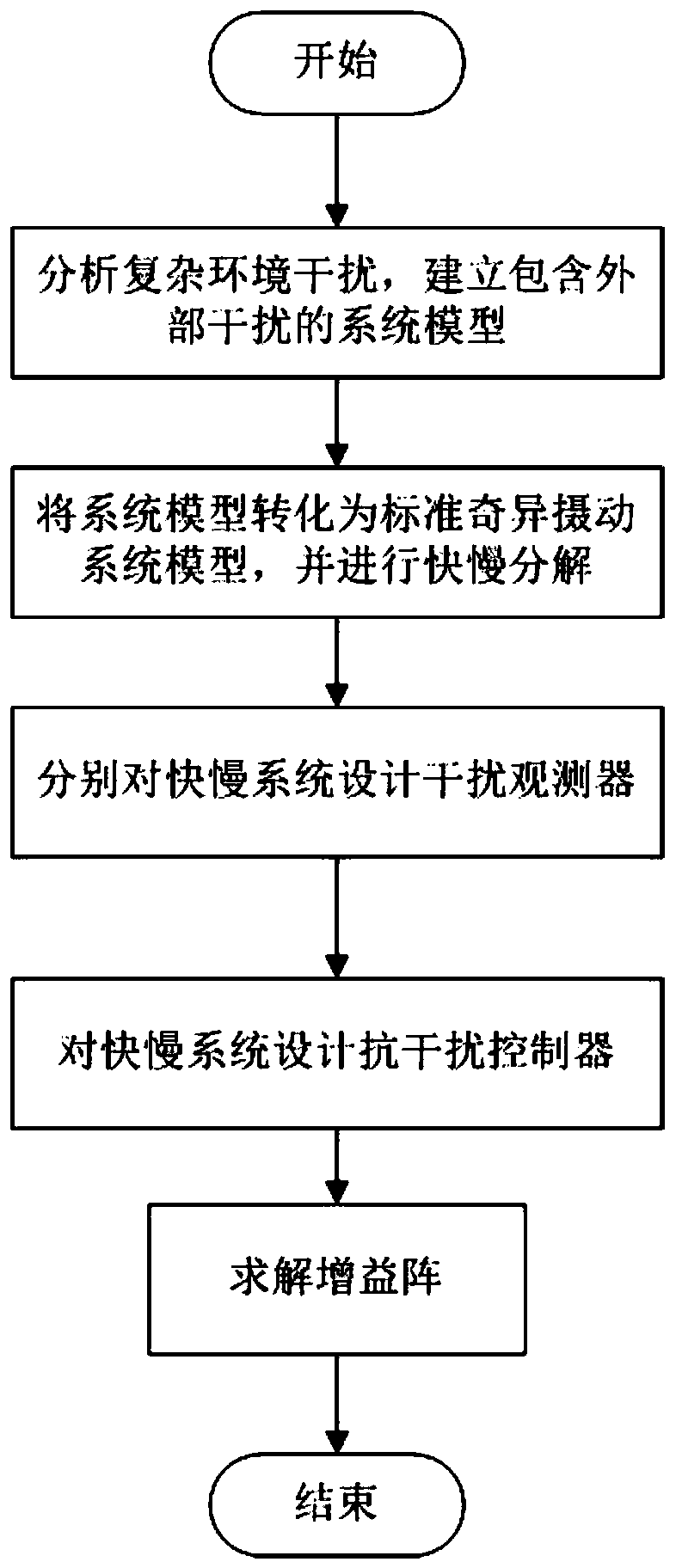
[0039] The present invention will be described in further detail below in conjunction with the accompanying drawings and examples. as attached figure 1 Shown, the specific implementation steps of the present invention are as follows (taking a certain attitude pilot system as an example):
[0040] 1. Establish a system model including external disturbances, and write the state space expression as follows:
[0041]
[0042] where x=[γ v θ q] T is the system state, Represents the first derivative of x to time, γ represents the displacement along the velocity direction, v represents the normalized velocity increment v=(V-V 0 ) / V 0, θ represents the pitch angle increment, q represents the pitch rate, u represents the system control input, d represents the external disturbance of the system, and y represents the system output. coefficient matrix C=[0 0 0 1], the initial value of x
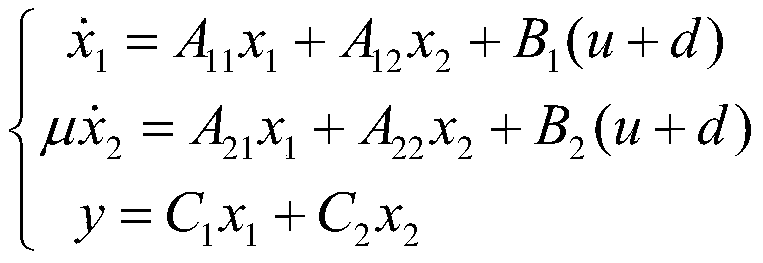
[0043] 2. Transform the system model to obtain the standard singular perturbation syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More