

Singular point avoiding method and device, equipment and medium
A singular point and singular area technology, applied in the field of singular point avoidance methods, devices, equipment and media, can solve problems such as non-smoothness, pose error, and the loss of movement ability of the robotic arm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
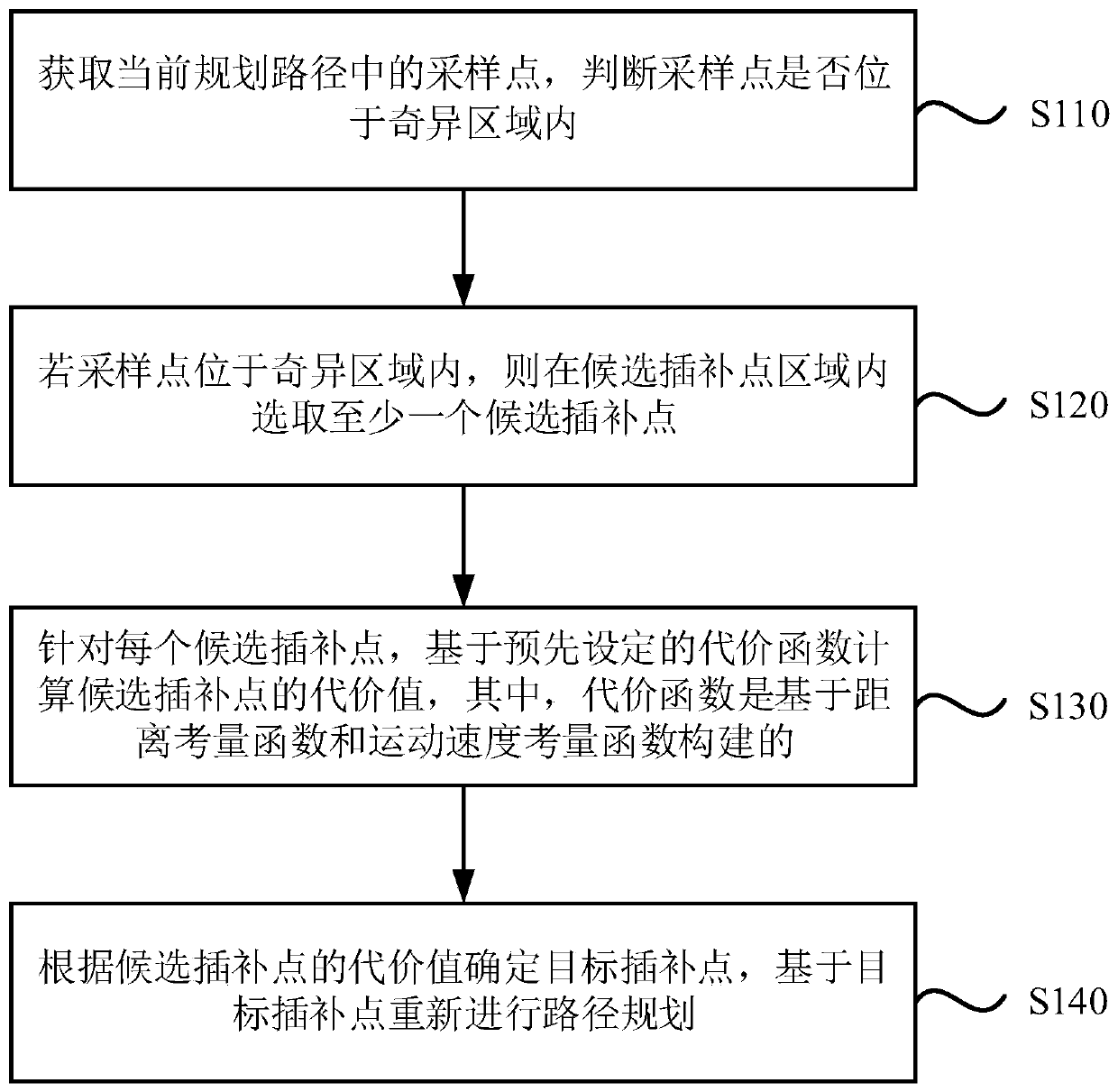
[0028] figure 1 It is a flow chart of a singularity avoidance method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of path planning for the robot arm. The method can be executed by a singularity avoiding device, and the singularity avoiding device can be implemented in software and / or hardware, for example, the singularity avoiding device can be configured in a computer device. like figure 1 As shown, the method includes:
[0029] S110. Obtain sampling points in the current planned path, and determine whether the sampling points are located in the singular area.
[0030] In this embodiment, the sampling points in the current planned path may be obtained by uniform sampling, or the sampling points in the current planned route may be obtained by random sampling. Preferably, the currently planned path is segmented to collect points, wherein the segmentation rules and the number of points to be collected can be set according ...
Embodiment 2
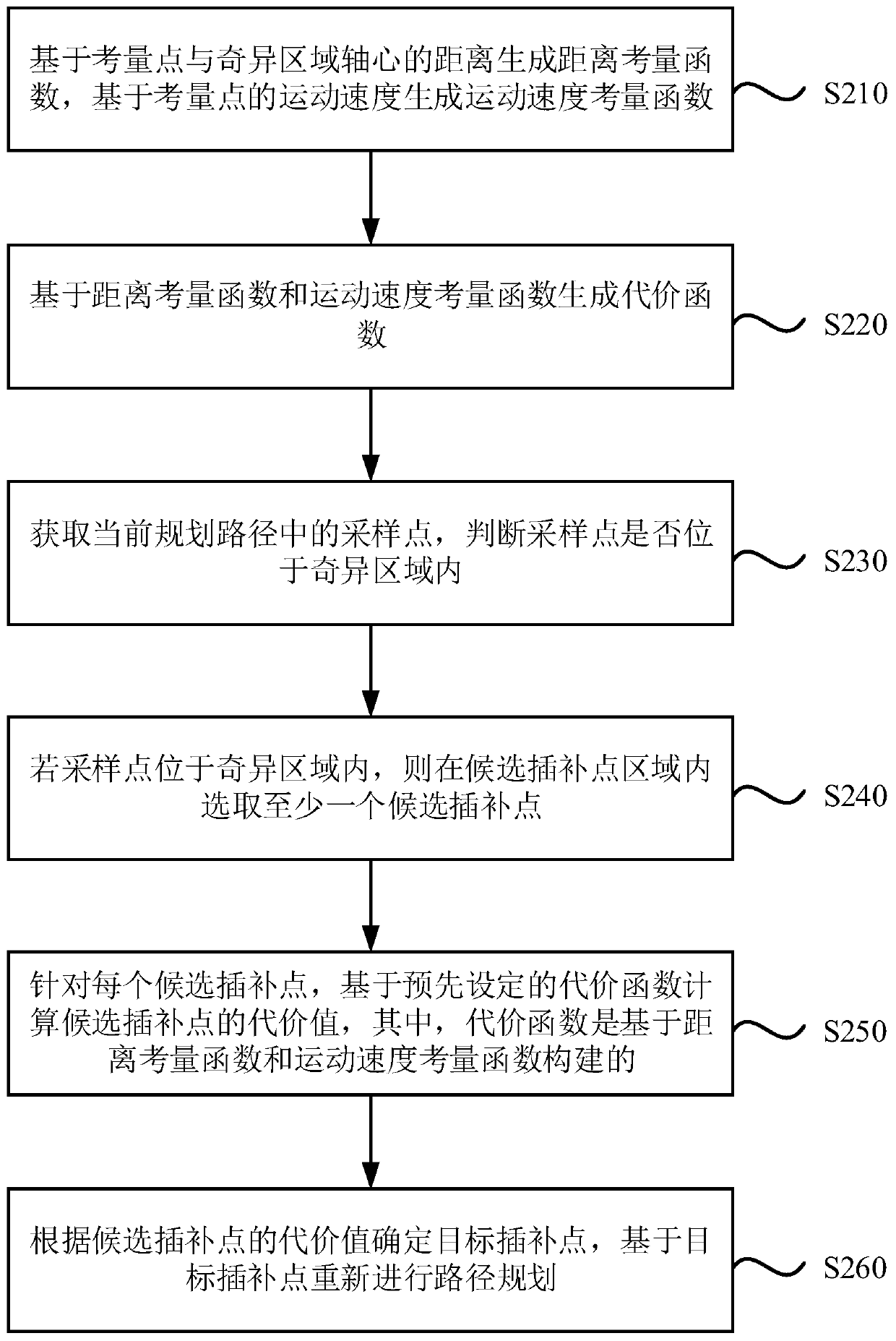
[0049] figure 2 It is a flow chart of a singularity avoidance method provided by Embodiment 2 of the present invention. In this embodiment, the generation of the cost function is embodied. like figure 2 As shown, the method includes:
[0050] S210. Generate a distance consideration function based on the distance between the consideration point and the axis of the singular region, and generate a movement speed consideration function based on the movement velocity of the consideration point.
[0051] In this embodiment, the distance consideration function and the movement speed consideration function are generated first, and then the cost function is generated based on the generated distance consideration function and movement speed consideration function.
[0052] In one embodiment, considering that the distance between the consideration point and the singular area is nonlinear, in order to ensure that the output of the distance consideration function also has nonlinear ch...
Embodiment 3
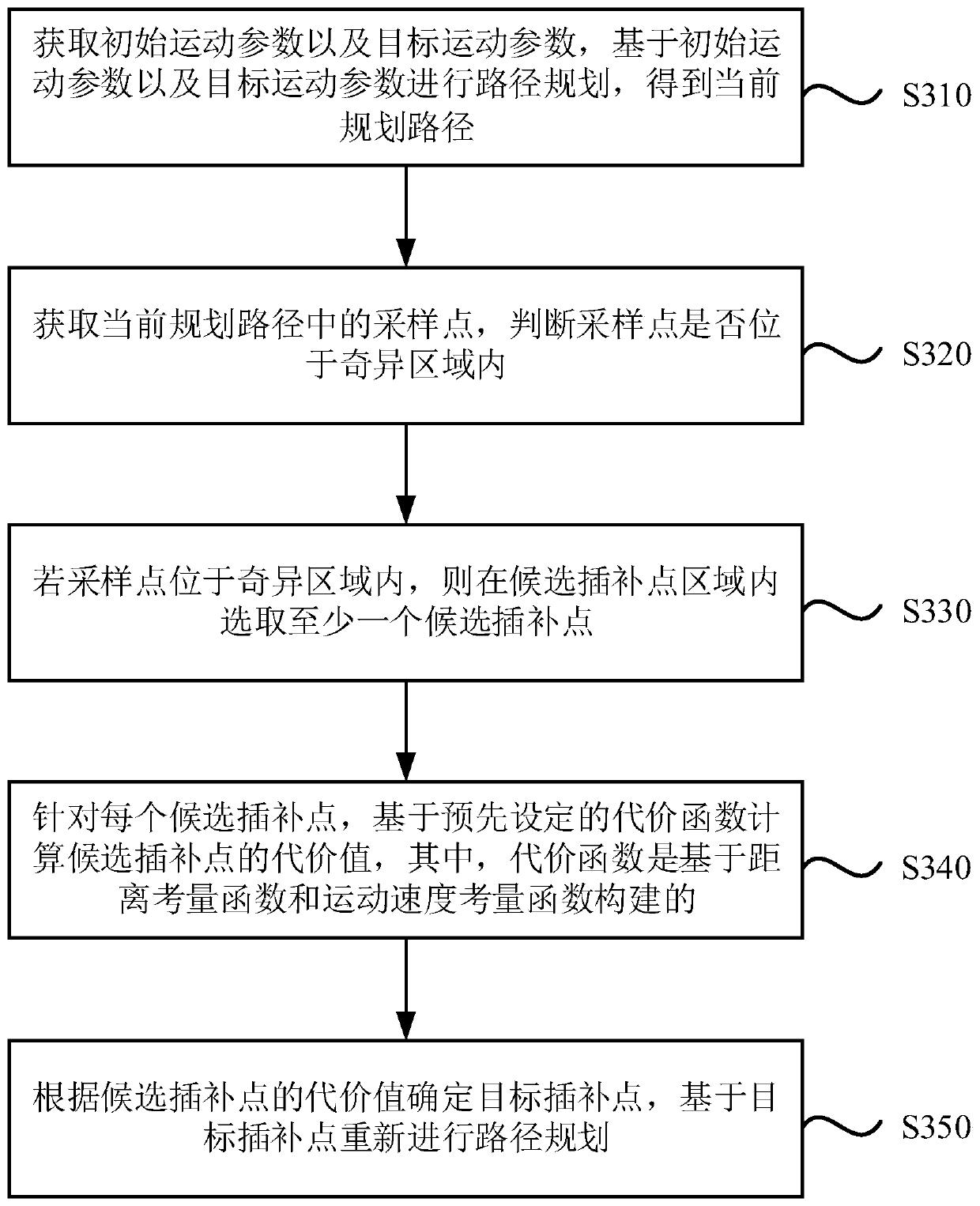
[0080] image 3 It is a schematic flowchart of a singularity avoidance method provided by Embodiment 3 of the present invention. This embodiment is further optimized on the basis of the foregoing embodiments. like image 3 As shown, the method includes:
[0081] S310. Obtain an initial motion parameter and a target motion parameter, perform path planning based on the initial motion parameter and the target motion parameter, and obtain a current planned path.
[0082] When the robot arm needs to perform a task, the current planning path is obtained by fitting according to the current position of the robot arm and the target position of the task. In this embodiment, the initial motion parameters may be the initial position value, the initial attitude value and the initial joint angle of the initial point of the mechanical arm motion, and the target motion parameters may be the target position value and the target attitude value of the target point of the mechanical arm motion...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More