

Task planning method for autonomous cooperation of unmanned aerial vehicle cluster
A mission planning and unmanned aerial vehicle technology, applied in the direction of instruments, data processing applications, prediction, etc., can solve the problems of high information quality requirements, poor system invulnerability, and high computational complexity, and achieve less information requirements and short communication delays , the effect of low computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
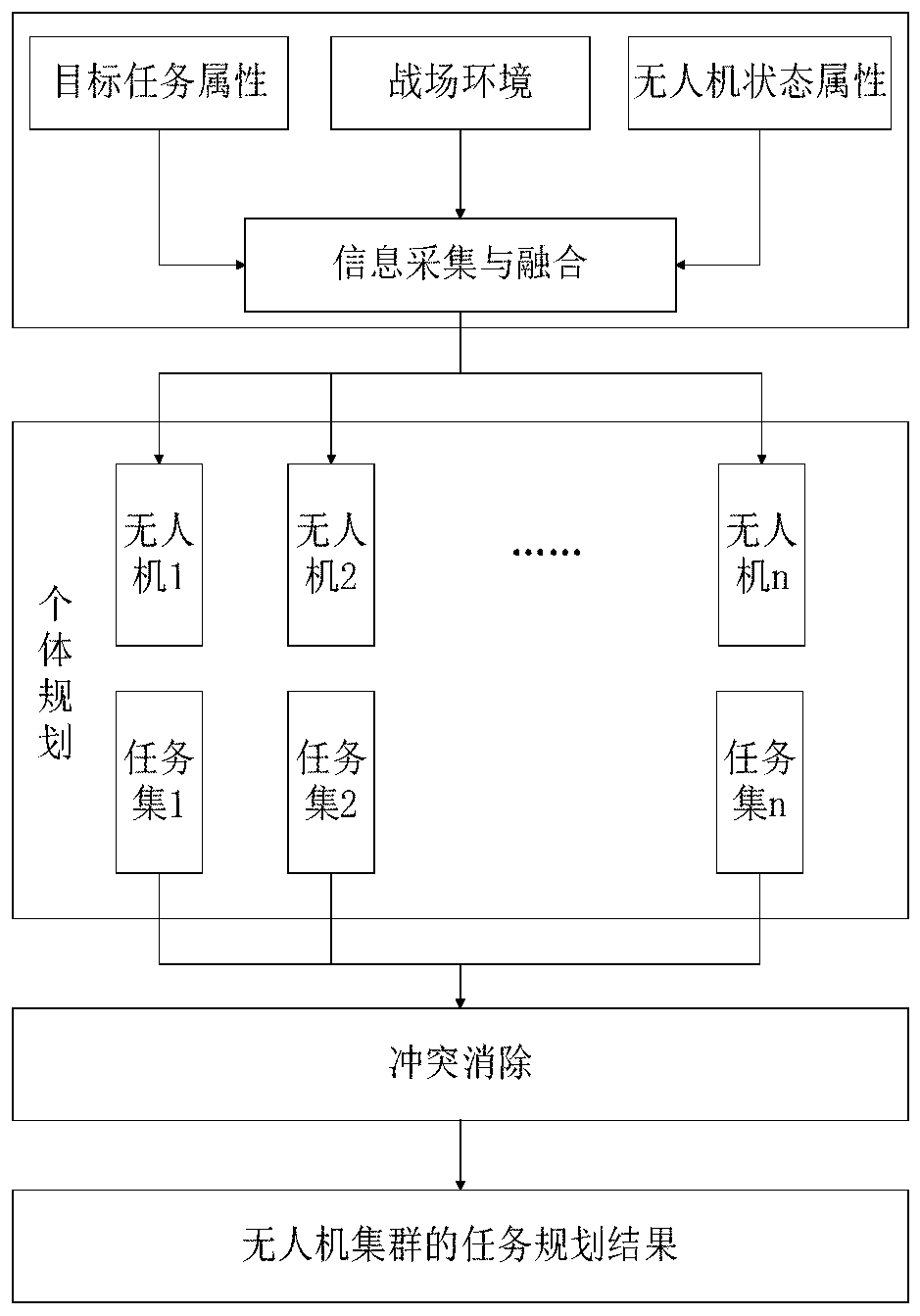
[0034] The task allocation problem in the process of UAV cluster cooperative reconnaissance, the purpose of this problem is to select the UAV and its reconnaissance resources to carry out the corresponding tasks, considering the attributes of the task itself and the required reconnaissance resources at the current moment , so that the overall efficiency of the UAV cluster to perform tasks is maximized. Its system framework is as figure 1 shown.
[0035] The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More