

Robot joint interaction force sensing and control method and device
A technology of robot joints and control methods, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0085] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without creative efforts fall within the protection scope of the present invention.
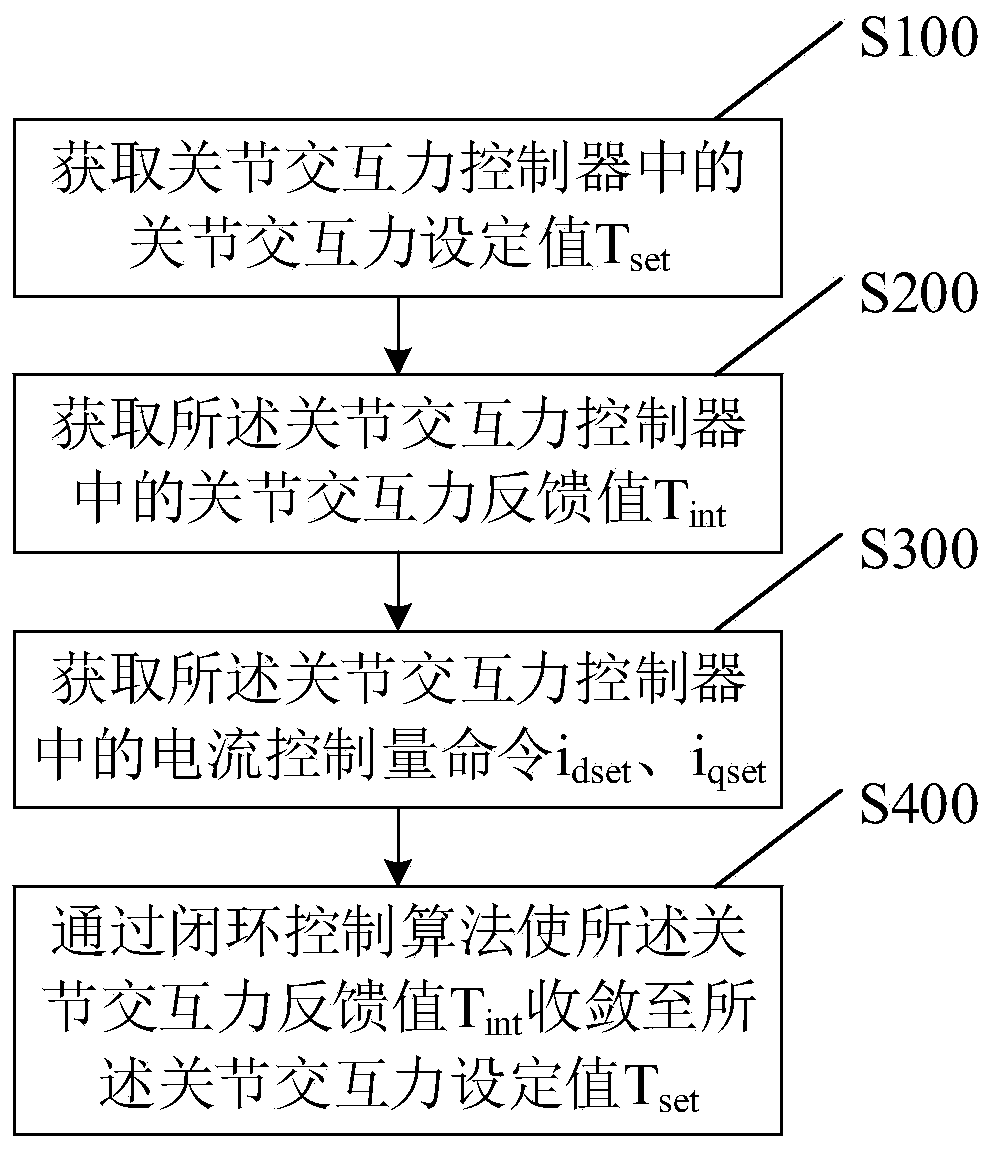
[0086] An embodiment of the present invention provides a method for sensing and controlling interactive force of a robot joint, including:
[0087] Step S100, obtaining the joint interaction force setting value T in the joint interaction force controller set .
[0088] In this embodiment, the joint interaction force setting value T set It is the preset val...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More