

Guaranteed Performance Maximum Power Tracking Method for Wind Turbine Based on Sliding Mode Control
A maximum power tracking, wind turbine technology, applied in wind energy generation, wind turbine, wind turbine control and other directions, can solve the problems of inability to guarantee the steady state performance of the system, many debugging parameters, and complex design process, and achieve a simplified controller. Design, avoid the design process, increase the effect of the unit capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0054] In this embodiment, the GH Bladed wind power development software is used to verify the effectiveness of the method provided by the present invention. In order to illustrate the innovation of the present invention, a comparison is made with the optimal torque control method commonly used in the industry at present.
[0055]
[0056] Among them, T gOTC is the electromagnetic torque value given by the optimal torque control algorithm, k opt is the control parameter, ω g is the generator speed, ρ=1.225Kg / m 3 is the air density, R=38.5m is the radius of the rotor, C pmax =0.482 is the maximum wind energy capture coefficient, λ opt = 8.5 is the optimum tip speed ratio, n g =104.494 is the gear ratio of the gearbox.
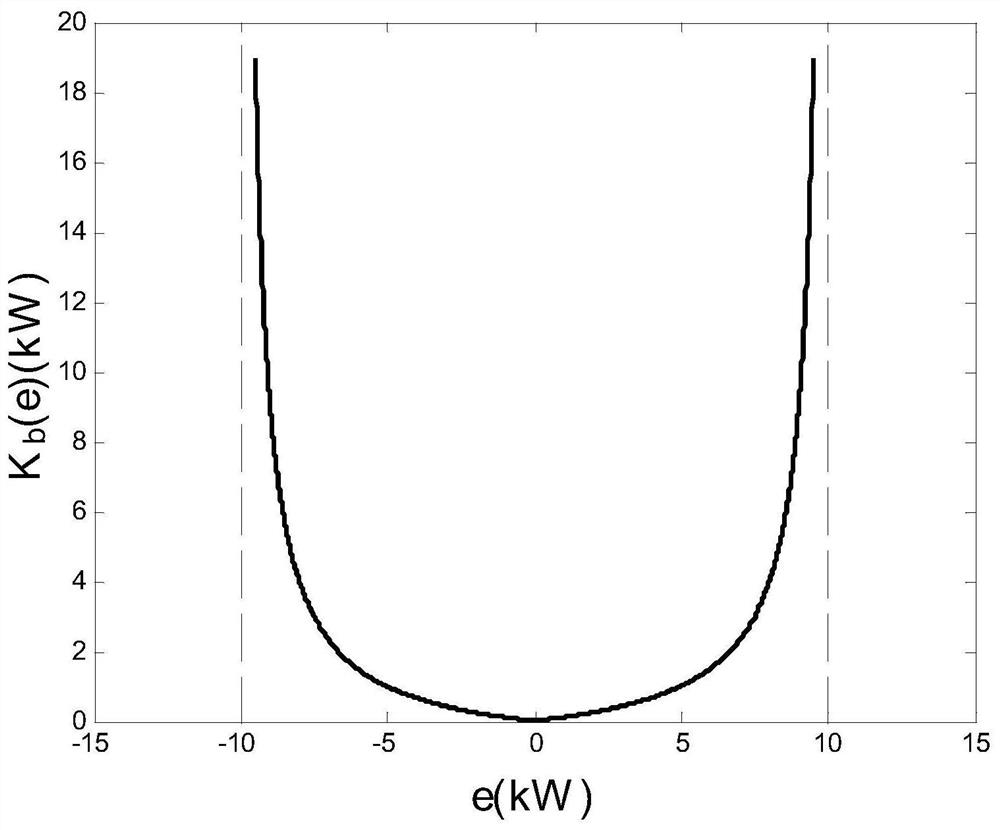
[0057] like figure 1 shown, is the fence Lyapunov function , where ε=10. It can be seen that, after the action of the fence Lyapunov function, the error is limited to the preset error bound, so the method of the present invention can improve the opt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More