

Articulated teaching arm and teaching method based on same
A teaching method and articulated technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of long teaching time, unfriendly teaching, high difficulty, etc., and achieve the effect of simple teaching process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
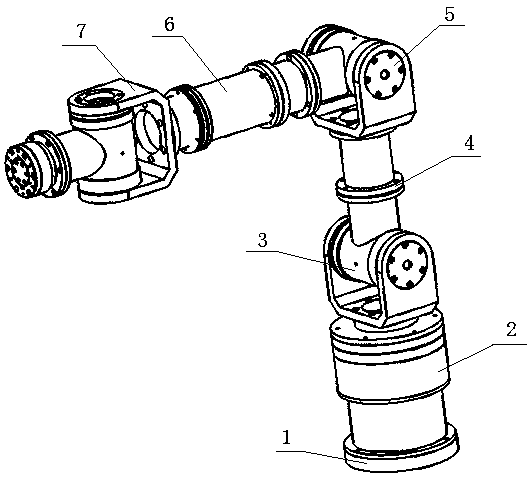
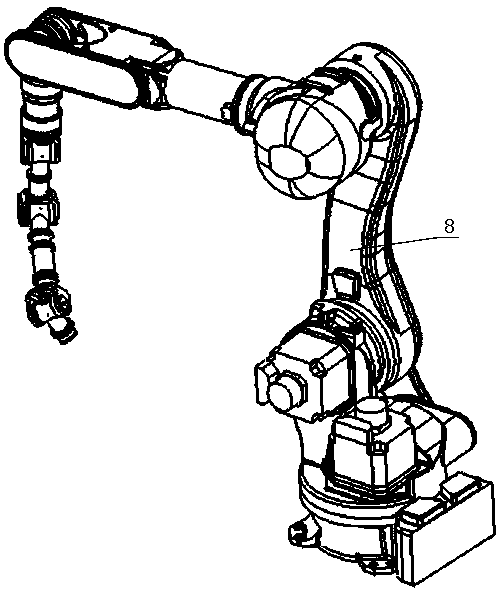
[0046] refer to image 3 , the teaching arm is installed on the flange of the robot 8 through the teaching arm flange 1 to form a series teaching, the robot 8 is installed on the base 9, the coordinate system of the base 9 is O, and the robot 8 is connected to the teaching arm The coordinate system at the end of the teaching arm is A, the coordinate system at the end of the teaching arm connected to the robot 8 is B, and the coordinate system at the end of the teaching arm away from the robot 8 is C.
[0047] Based on the above-mentioned articulated teaching arm, this embodiment proposes a teaching method for an articulated teaching arm, including the following steps:
[0048] Step 1: The robot is in a static state during the serial teaching process, and the end pose of the robot is calculated by reading the angles of each joint on the teach pendant; the second transformation matrix of the end pose matrix of the robot relative to its base coordinate system for:
[0049]
...
Embodiment 2
[0059] refer to Figure 4 , in order to be able to teach more intuitively and conveniently, another teaching method is adopted, that is, parallel teaching. The parallel teaching uses the upper computer PC and the teaching arm as the client, and the robot controller as the server. Communicate with each other through Ethernet, the upper computer PC and the robot controller are directly connected through a crossover cable, write the client program on the upper computer, and at the same time do data acquisition and data processing for the encoder of the teaching arm, the upper computer PC and the robot controller The inter-communication protocol stack is realized by Socket, and the robot 8 and the teaching arm are placed in parallel in space, and the steps include:
[0060] The first step: set up a coordinate system, the base coordinate system of the robot 8 is O 1 -X 1 Y 1 Z 1 , the base coordinate system of the teaching arm is O 2 -X 2 Y 2 Z 2 , both have the same refere...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More