

Non-contact detection positioning method and system based on LoRa signals
A non-contact, positioning method technology, used in radio wave measurement systems, positioning, measuring devices, etc., can solve problems such as cost and insufficient sensing and positioning range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
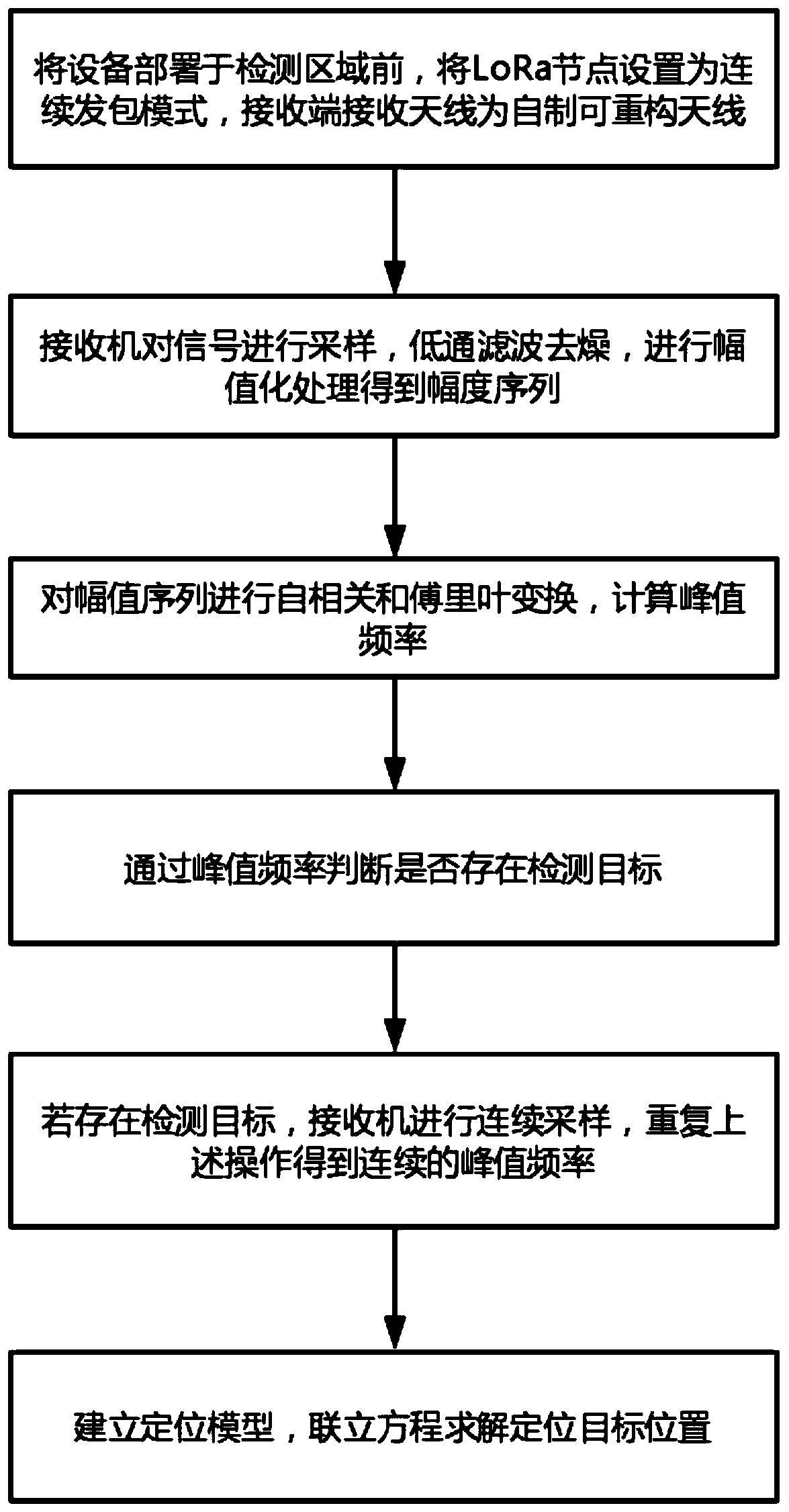
[0077] This embodiment discloses a non-contact detection and positioning method based on LoRa signals, including the following steps:
[0078] Step 1: switch the receiving mode of the signal by polling to receive the signal, and obtain the first mode signal, the second mode signal and the third mode signal;
[0079] Step 2: Sampling, low-pass filtering, and amplitude processing any mode signal in the current time period to obtain the amplitude sequence A, segment A to obtain Q target windows, and then perform sequence A containing Q target windows After autocorrelation and Fourier transform, the sequence F is obtained, and the maximum peak frequency of each target window of F is selected to obtain the peak frequency set Indicates the maximum peak frequency q∈[1,Q] of the qth target window and Q is a positive integer; (the segmentation method is: the sampling point is divided into a section with a window of 1s width and a sliding window of 0.25s each time)
[0080] Step 3: ...
Embodiment 2
[0098] This embodiment discloses a non-contact detection and positioning system based on LoRa signals, including a transmitting end Tx and a receiving end Rx;
[0099] The Tx includes a LoRa node for transmitting signals to the detection area;
[0100] The Rx includes a reconfigurable antenna and a signal processor, the reconfigurable antenna is used to switch the receiving mode of the signal in a polling manner to receive the signal, and obtain the first mode signal, the second mode signal and the third mode signal, The signal processor includes a preprocessing module, a target detection module and a target positioning module;
[0101] The preprocessing module is used to obtain an amplitude sequence A by sampling, low-pass filtering, and amplitude processing the signal in any receiving mode of the current time period, segmenting A to obtain Q target windows, and then including After performing autocorrelation and Fourier transform in the sequence A of Q target windows, the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More