

Passive compliance polishing robot aiming at planar work piece
A technology of robots and compliant mechanisms, applied in the field of robotics, can solve the problems of inability to integrate research and practical applications, incomplete compliance with practical problems, and low grinding accuracy, and achieve the effects of simplified design process, high precision, and lightweight structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and implementation methods. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention.
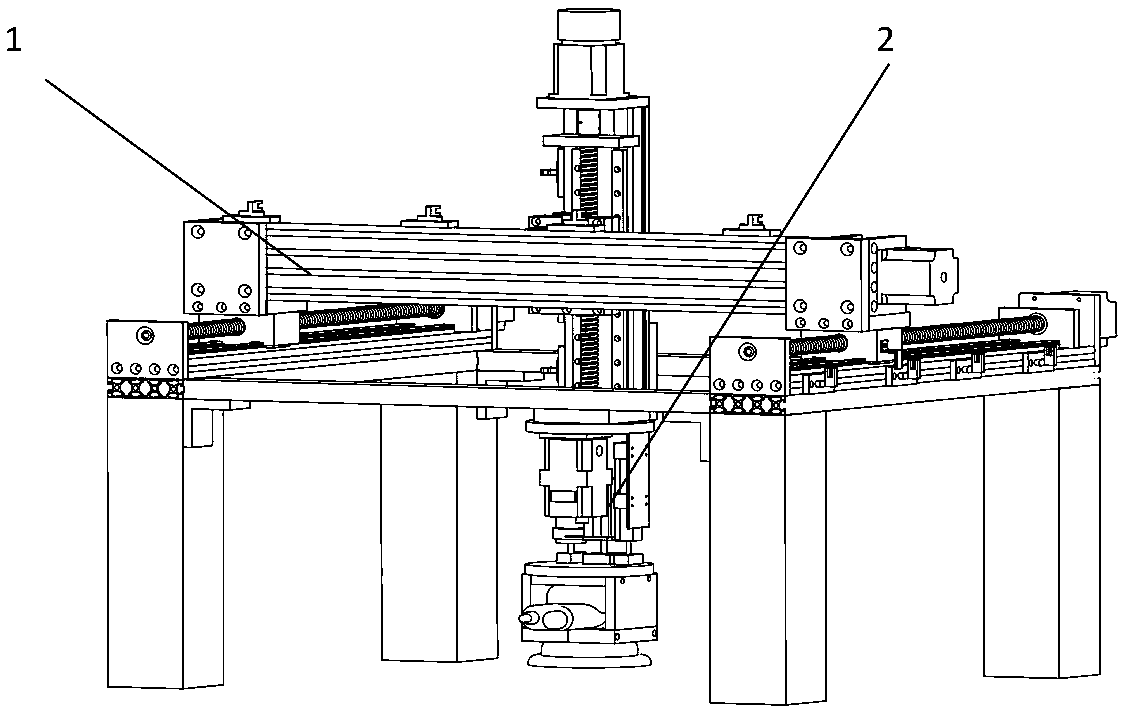
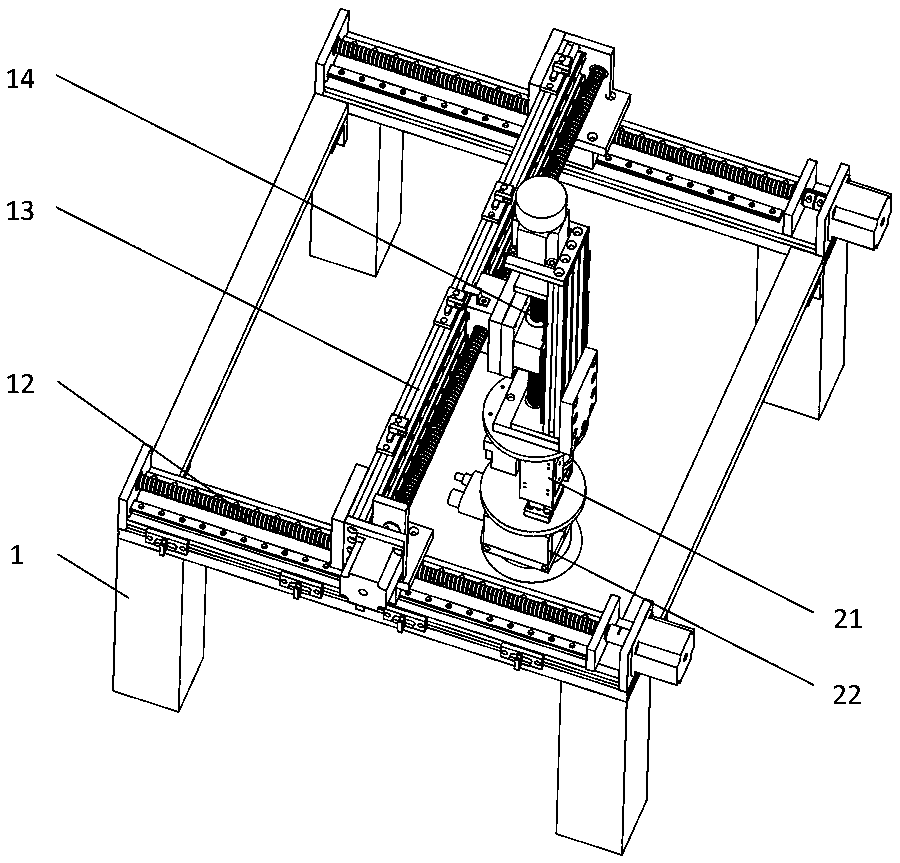
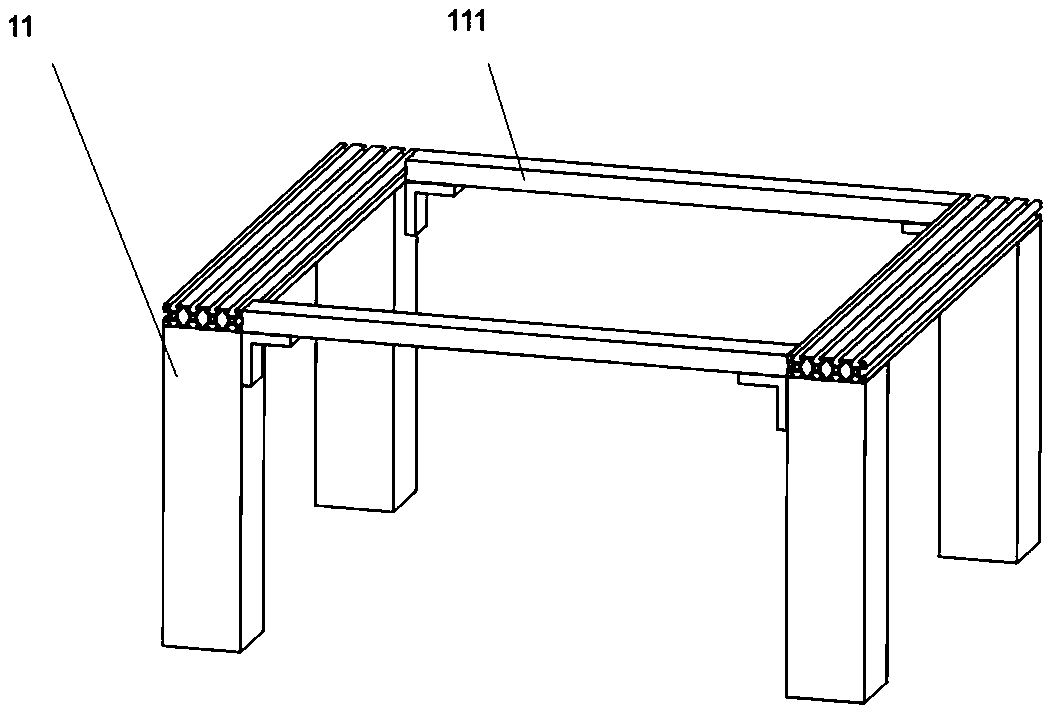
[0043] Such as figure 1 , 2 As shown in and 3, a passive and compliant grinding robot facing a planar workpiece includes a Cartesian coordinate robot 1 and a passive compliant grinding device 2. The Cartesian coordinate robot 1 includes a mounting frame 11, a pair of X-axis linear drive mechanisms 12, and a Y-axis linear drive mechanism. Mechanism 13 and Z-axis linear drive mechanism 14, the mounting frame 11 includes a horizontal rectangular frame 111, and the passive compliance grinding device 2 is fixedly installed on the bottom end of the Z-axis linear drive mechani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More