

Robot machining work normal constant force tracking method and device
A technology of robot processing and operation method, applied in the field of robot control and normal constant force tracking in robot processing operations, which can solve the problems of increasing production costs, difficulty in obtaining processing trajectories, and difficulty in normal tracking, and achieves improved force control. Accuracy, avoid cost increase effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
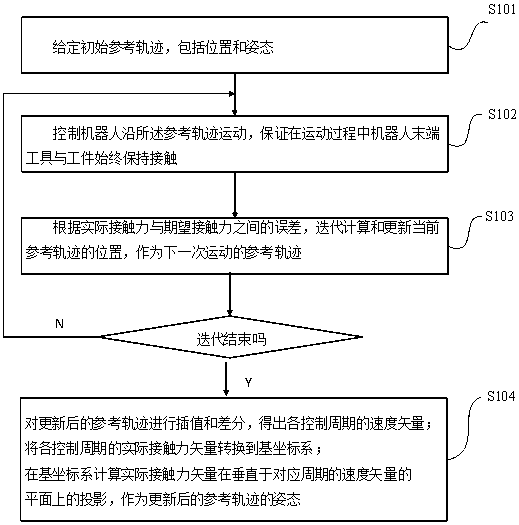
[0066] Such as figure 2 As shown, the robot processing operation normal direction constant force tracking method package in this embodiment
[0067] Include the following steps:
[0068] Step S101: Given an initial reference trajectory, including position and attitude
[0069] That is, given a rough reference trajectory X r , including position and attitude, where the attitude refers to the attitude direction of the end-processing tool of the robot.
[0070] Optionally, the initial reference trajectory can be obtained through teaching points, model export or traction teaching.
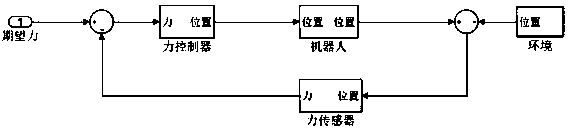
[0071] Step S102: Control the robot to move along the reference trajectory, ensuring that the end tool of the robot is always in contact with the workpiece during the movement.
[0072] Set the robot to move along the reference trajectory, and at the same time turn on the force control function, set appropriate force control parameters, such as reference force, damping, etc., to ensure that the en...
Embodiment 2
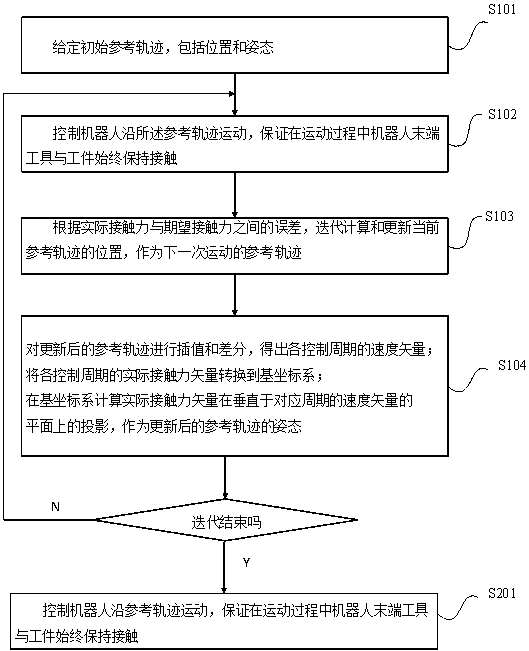
[0115] Such as image 3 As shown, the difference between this embodiment and the first embodiment is that after updating the trajectory position each time, the attitude must be updated. This method increases the amount of computation, but can further improve the accuracy of the reference trajectory.
[0116] Optionally, the robot normal direction constant force tracking method further includes step S201: controlling the motion of the robot according to the reference trajectory obtained after the iteration, including position and posture, for formal workpiece processing.
[0117] attached Figure 4 An embodiment of the constant force tracking device for the normal direction of the robot processing operation according to the present disclosure is provided. Such as Figure 4 As shown, the device includes:
[0118] The force sensor, as a kind of actual contact force acquisition device, is used to measure the actual contact force between the end processing tool of the robot and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More