

Vehicle following model stability control method considering driver perception error
A technology for stability control and vehicle following, which is applied in the field of traffic control and can solve the problem of no driver being given.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
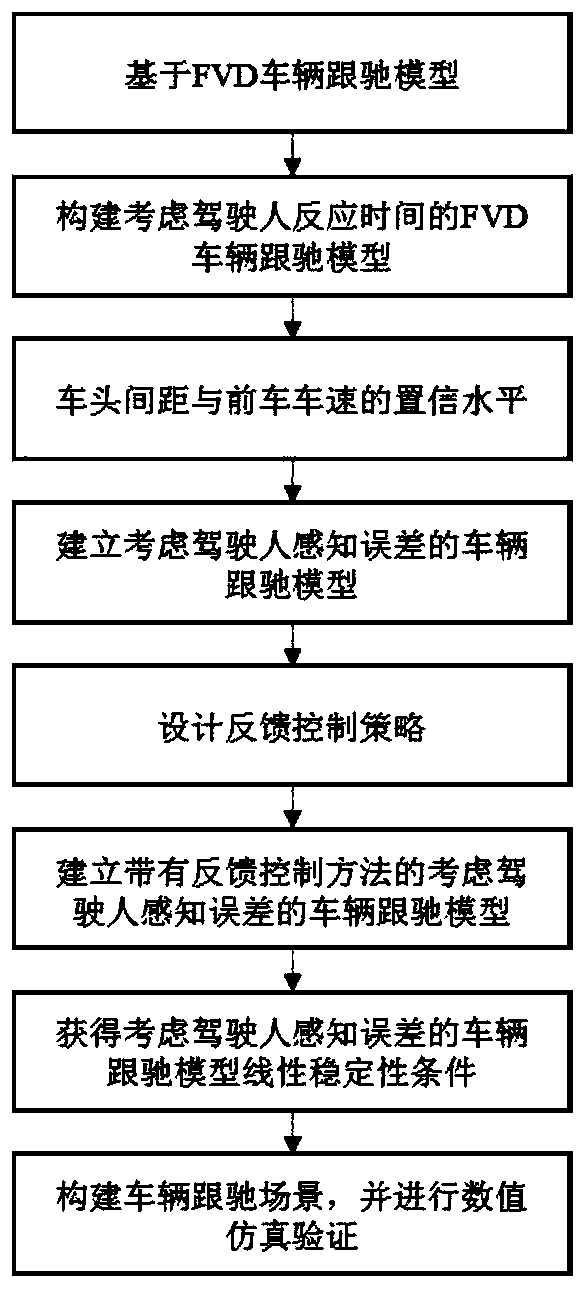
[0032] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0033] Such as figure 1 , figure 2 As shown, the present invention sets the traffic scene that needs to be simulated through the motion-controllable guiding vehicle, and selects the value of the parameters according to the set traffic scene, including the driver's reaction time τ, acceleration sensitivity coefficient k, λ, front The confidence levels of the speed of the vehicle and the distance between the heads are α and β respectively, and the standard deviations of the perception errors of the speed of the preceding vehicle and the distance between the heads are ζ(v n-1 )with The adjustable gain parameter γ of the feedback controller, the response delay time lag τ of the feedback controller * .
[0034] The present invention first obtains the initial state of all vehicles. The simulation simulates the movement state of the vehicle platoon when t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More