

Unmanned commanding and dispatching system based on ground equipment machine vision
A technology of command and dispatch system and ground equipment, applied in the direction of control/regulation system, general control system, instrument, etc., can solve problems such as low operation efficiency, large labor cost, and insufficient coordination, so as to improve efficiency and quality, and improve The level of intelligence and the effect of reducing labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
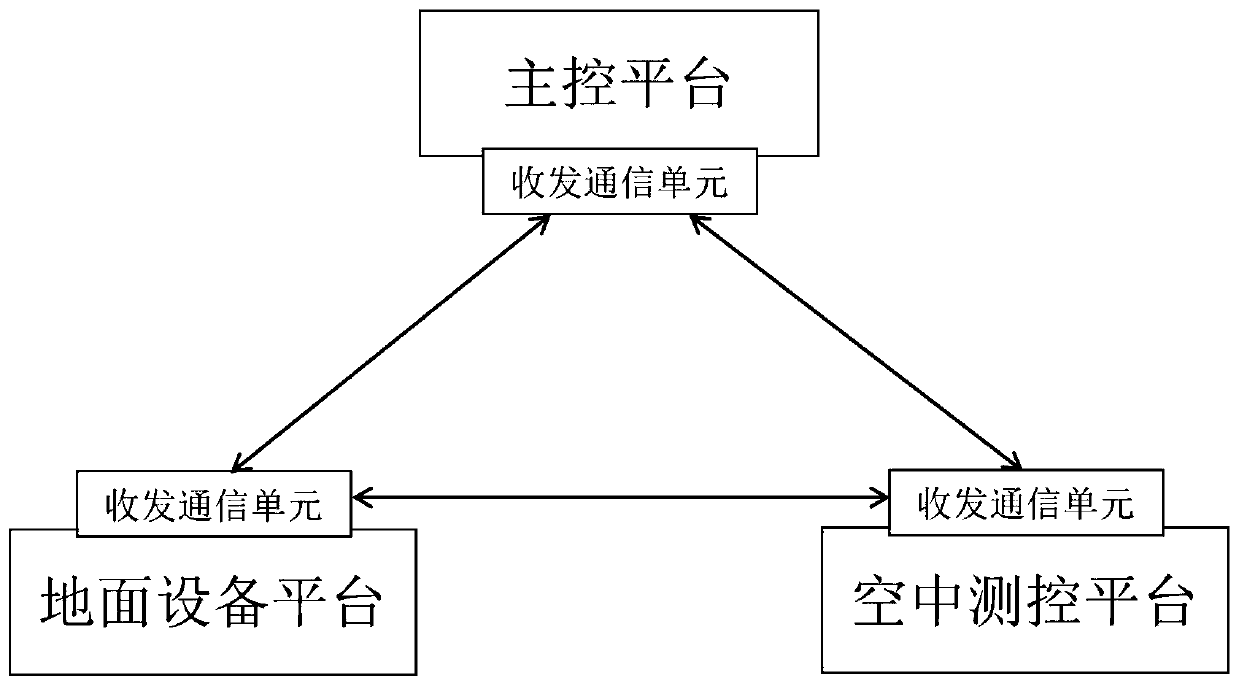
[0035] Such as Figures 1 to 4 As shown, an unmanned command and dispatch system based on ground equipment machine vision includes a main control platform, a ground equipment platform, and an air measurement and control platform. The main control platform, ground equipment platform, and air measurement and control platform are all equipped with a transceiver communication unit , through a dedicated short-range wireless communication protocol to realize independent and independent networking, and build a wireless communication local area network;
[0036] The main control platform includes an operation management module, which is used to transmit initial operation parameters to the ground equipment platform and the air measurement and control platform, and start or stop the system operation when the task is completed or in an emergency;
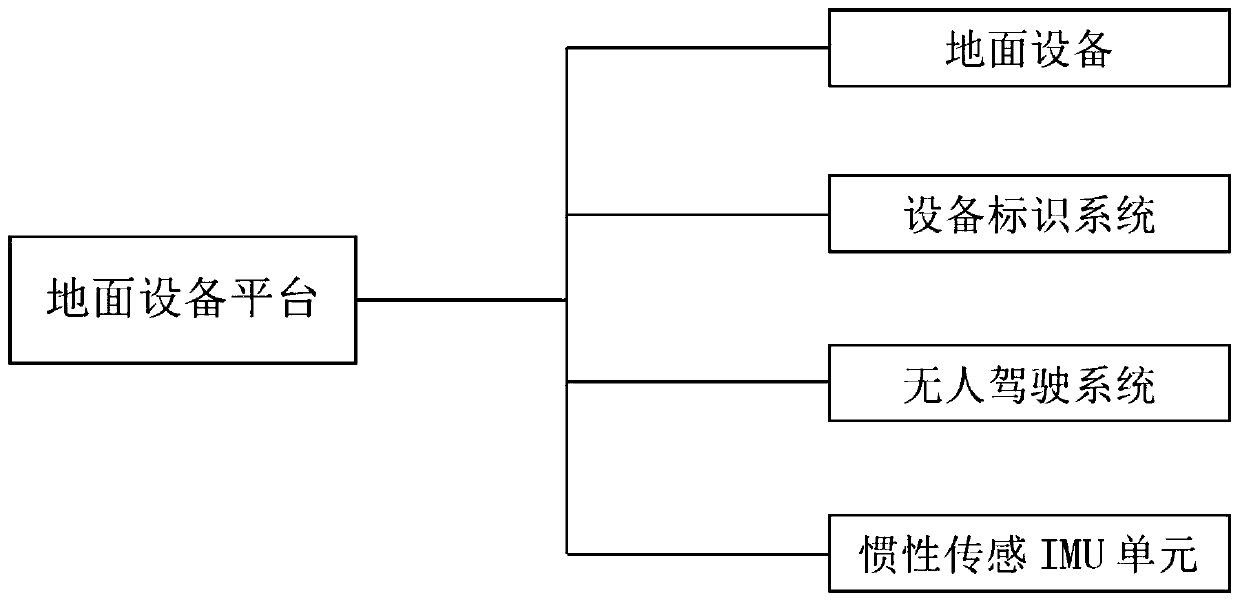
[0037]The ground equipment platform includes ground equipment, an equipment identification system, an unmanned driving system, and an inertia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More