

RGB-D point cloud splicing method and system based on 2D-3D weak feature 3D neighborhood probability matching
A 2D-3D, RGB-D technology, applied in the field of computer vision, can solve the problem that the stability and accuracy of stitching cannot reach a higher standard.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] In order to solve the problems of the prior art, the inventor has conducted in-depth research and found that:
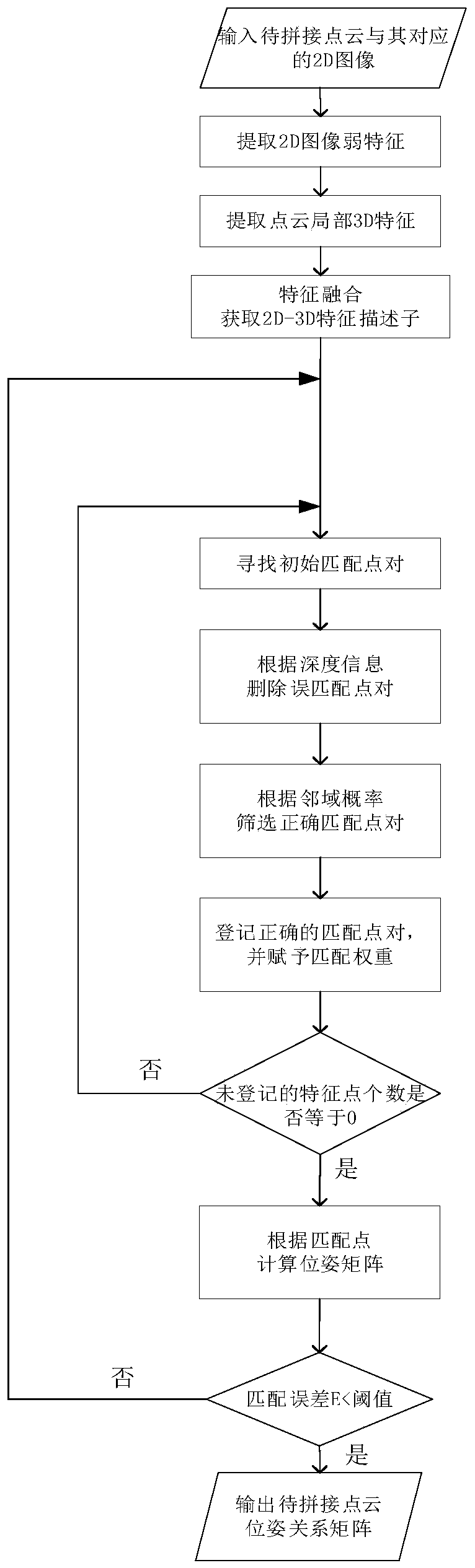
[0072] The existing technology is a point cloud splicing method based on the combination of the labeling method and the iterative closest point algorithm (ICP). The labeling method is used to complete the initial rough splicing, and then the improved ICP algorithm is used to improve the splicing accuracy.
[0073] However, the labeling method is still unable to measure items that are not suitable for pasting (such as cultural relics, large objects). For this reason, prior art 2 proposes a registration algorithm based on the geometric properties of point clouds. The curvature of the point cloud is used as the registration relationship, and then By introducing the geometric properties of the rigid body transformation vector to eliminate the mismatch points, the algorithm can get effective coupling points to calculate the original transformation matrix, but the ra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More