

Ankle joint boosting exoskeleton
An ankle joint and exoskeleton technology, which is used in equipment to help people move, passive exercise equipment, physical therapy, etc., can solve the problems of slow power response, insufficient driving force, etc. The effect of reducing waiting time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
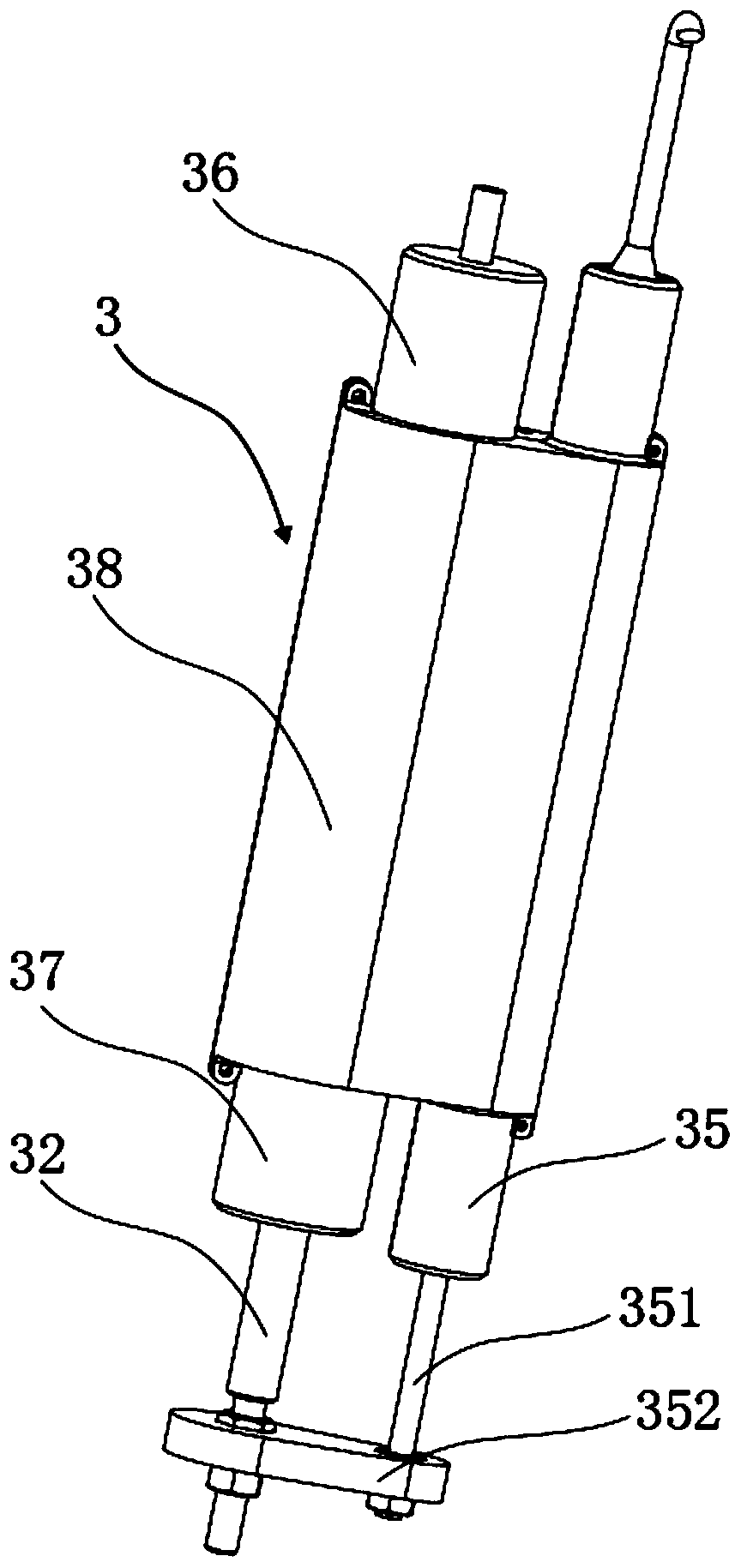
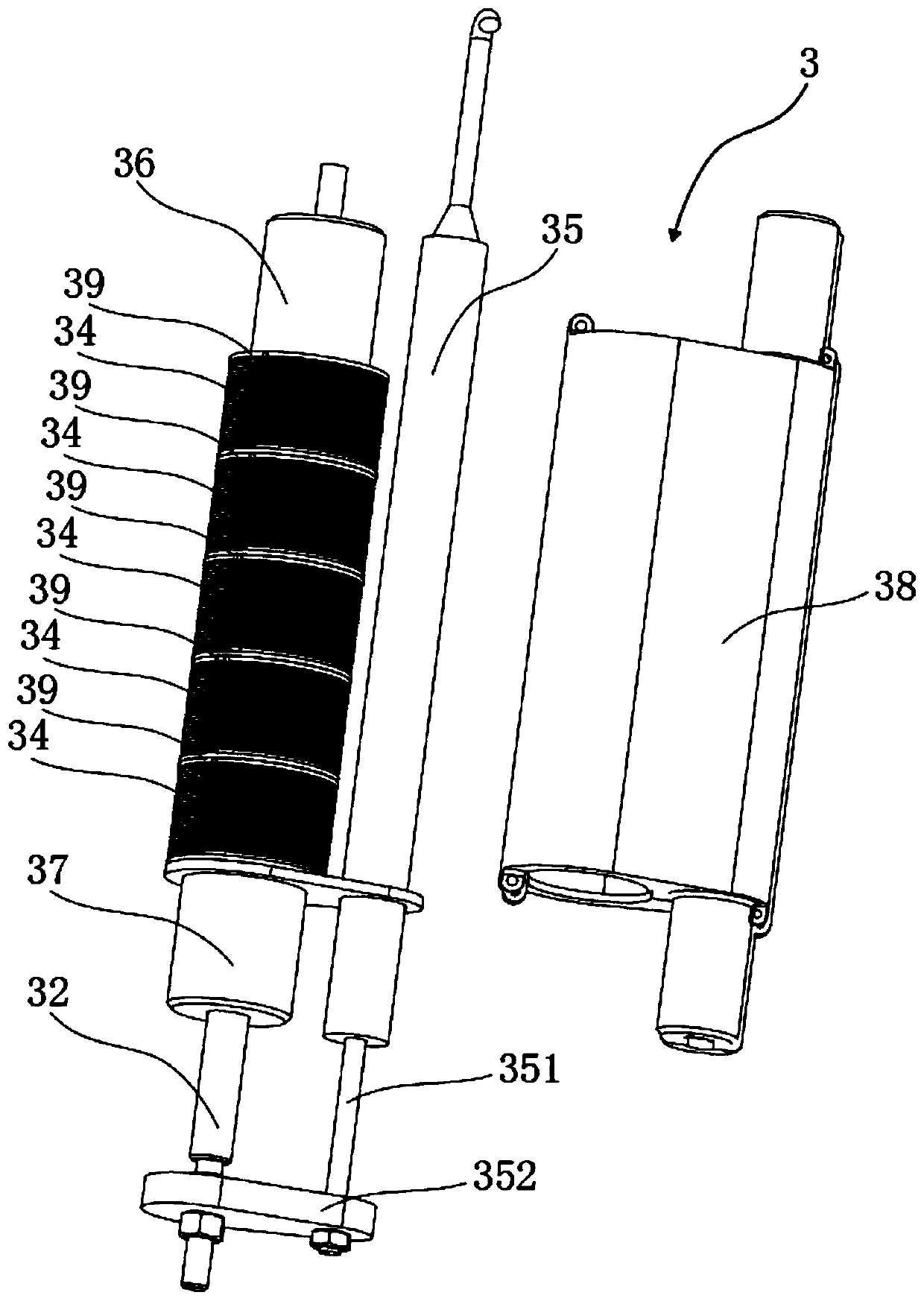
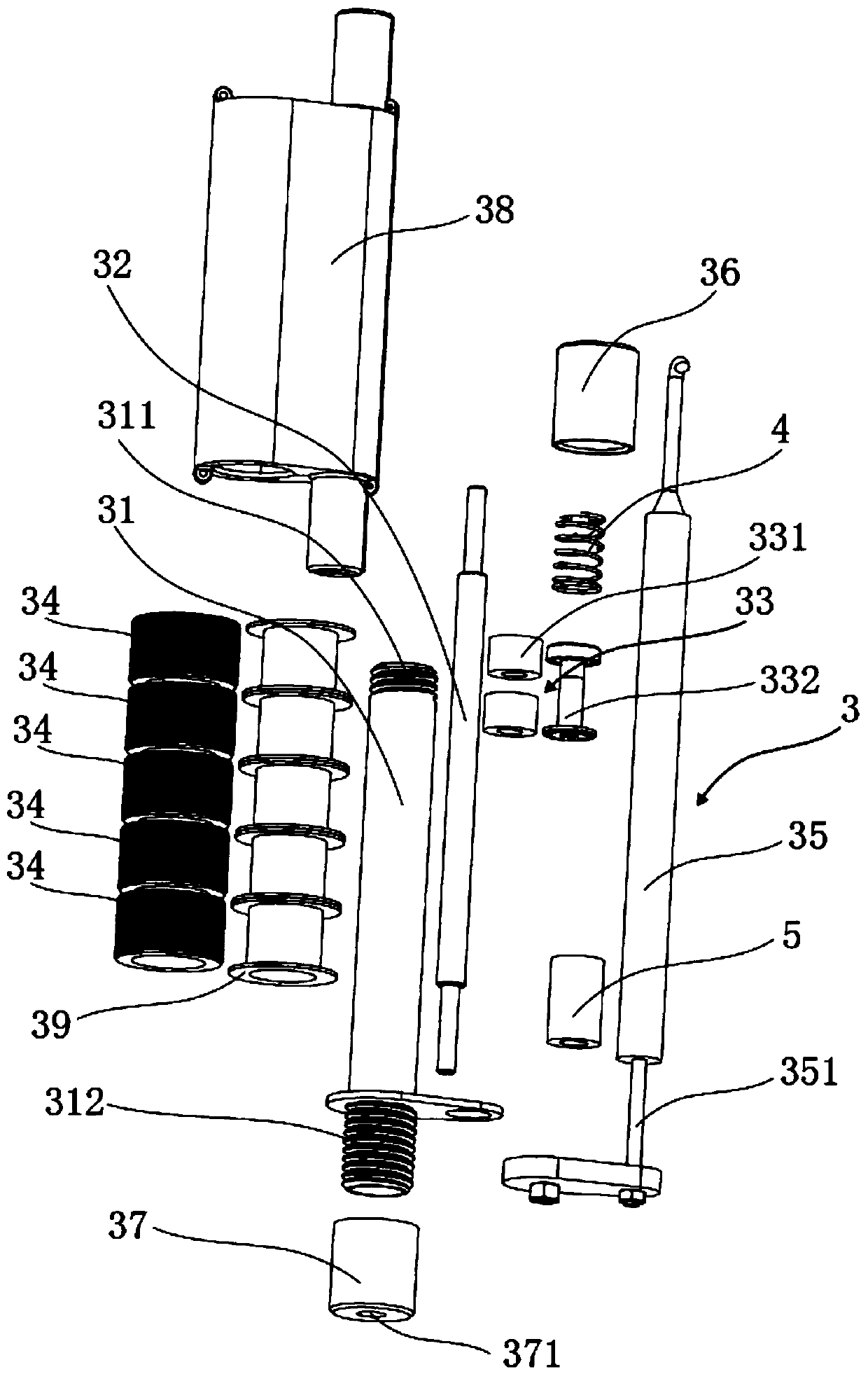
[0045] Furthermore, please also refer to figure 2 , image 3 and Figure 4 , as a specific implementation of the electromagnetic drive mechanism provided by the present application, the electromagnetic drive mechanism also includes a linear displacement sensor 35 for detecting the position of the magnet member 33, and the displacement pull rod 351 of the linear displacement sensor 35 is connected with the drive rod 32, and the linear displacement The sensor 35 is electrically connected with the controller.
[0046] Specifically, the pull rod 351 of the linear displacement sensor 35 is fixedly connected with the drive rod 32 through the connection block 352, and the connection block 352 is fixedly connected with the pull rod 351 and the drive rod 32 by means of bolts and nuts respectively, so that the pull rod 351 and the drive rod 32 The synchronous movement achieves the purpose of accurately detecting the displacement position of the permanent magnet 331 of the magnet memb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More