

Surgical robot
A surgical robot and surgical instrument technology, applied in the field of surgical robots, can solve the problems of reduced surgical accuracy, easy fatigue of doctors, low flexibility, etc., to reduce the risk of damage and increase the degree of freedom and flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with accompanying drawing.
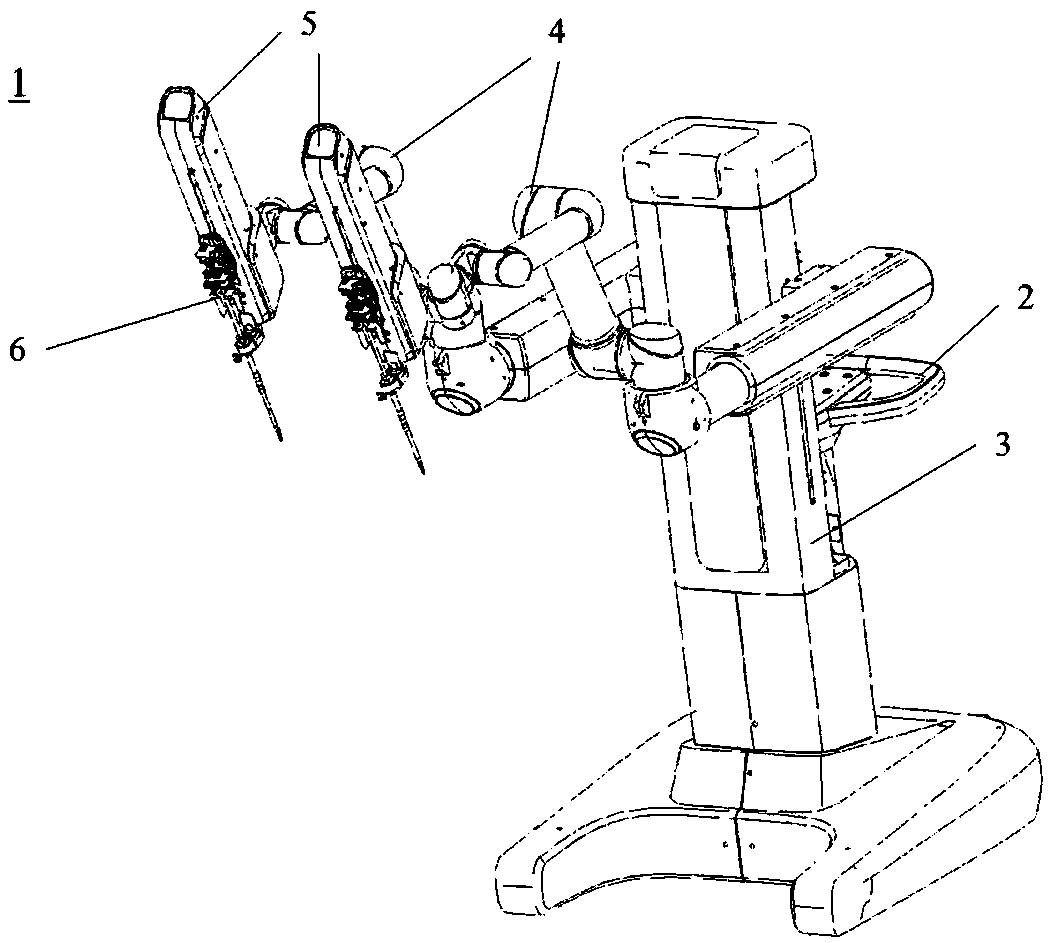
[0030] Such as figure 1 As shown, the surgical robot 1 includes a pusher 2 , a trolley 3 , a mechanical arm 4 , a slide 5 and a surgical instrument assembly 6 .
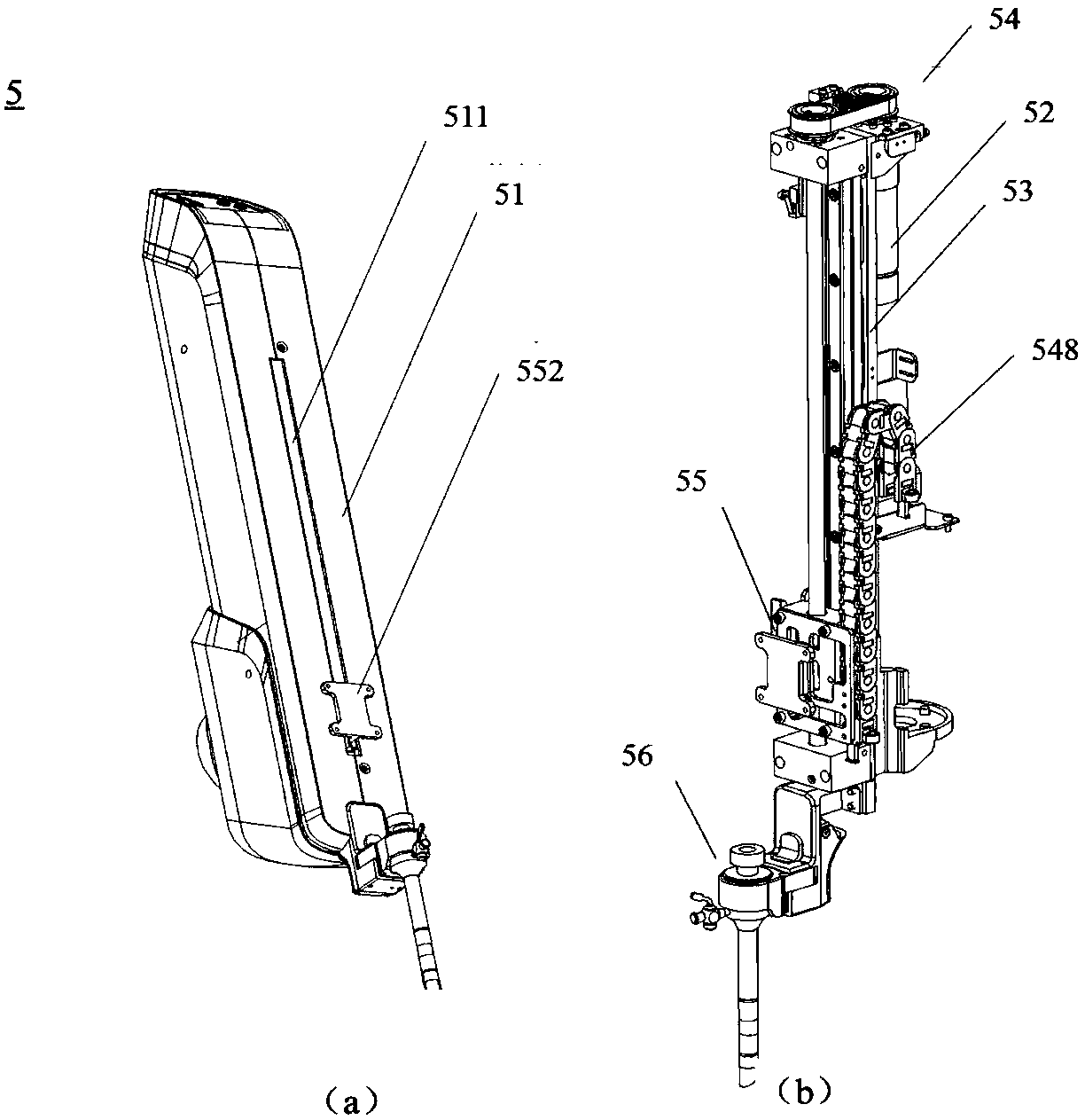
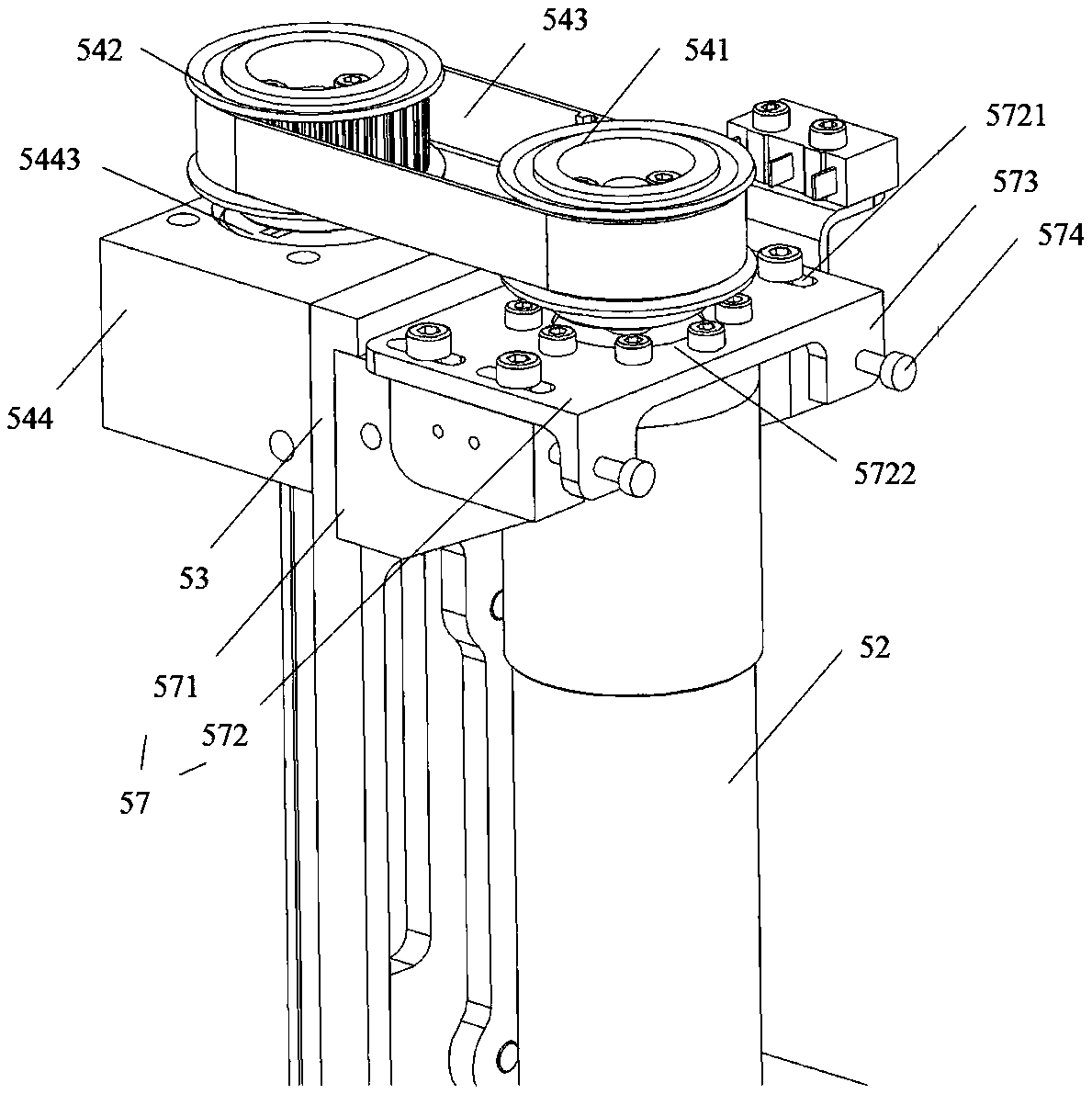
[0031] Such as figure 2 As shown in (a) and (b), the slide table 5 is composed of a housing 51, a driving motor 52, a mounting plate 53, a transmission part 54, a surgical instrument assembly connecting support 55 and a poking mechanism 56, wherein the transmission part 54 includes a driving wheel 541, a driven wheel 542, a synchronous belt 543, a bracket 544, a lead screw pair 545, and the lead screw pair 545 includes a lead screw 546 and a first slide block 547.
[0032] Such as figure 2 (a), (b) and image 3 As shown, the driving motor 52 is preferably provided with an encoder, and the driving motor 52 is arranged on the front of the mounting plate 53 through a driving motor fixing member 57 along the len...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More