

An indoor blind-guiding robot
A blind guide robot and robot technology, applied in the field of service robots, can solve problems such as poor human-computer interaction experience, and achieve good human-computer interaction experience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
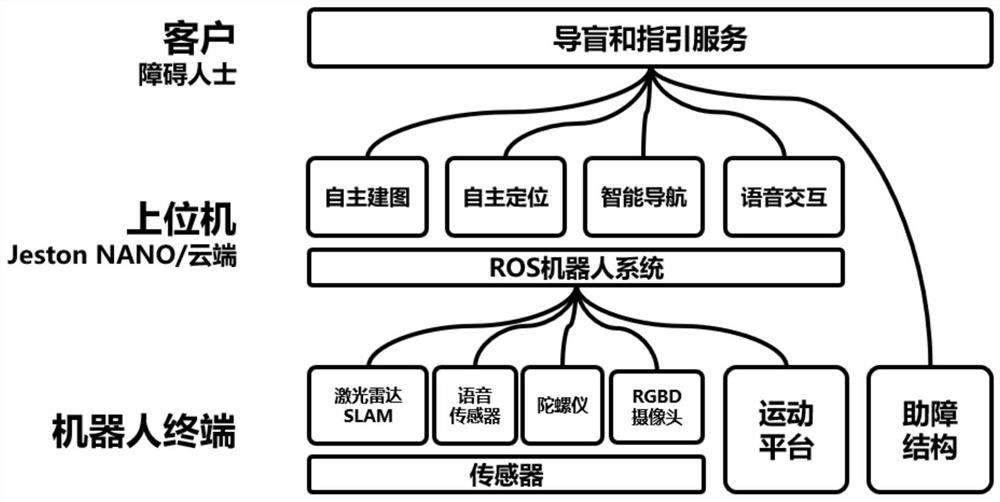
[0068] The present invention solves three problems: one is to provide real-time positioning for the blind in a complex indoor environment and plan the optimal route from the starting point to the destination for them; the other is to provide guidance for the progress of the blind through the movement of the robot; The third is to enhance the human-computer interaction experience by adding vibration interaction handles and voice interaction functions.
[0069] Its main features are as follows:
[0070] Based on the above-mentioned first problem "providing real-time positioning for the blind in a complex indoor environment and planning the optimal route from the starting point to the destination for them"; the present invention is equipped with a Jeston Nano processor (blind-guiding decision-making layer) and a single-line laser radar on the robot. , IMU; the ROS control framework is deployed on Jeston Nano, which mainly includes SLAM service system and blind guide service stack...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More