

Robot motion planning method and system, computer equipment and storage medium
A robot movement and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to guarantee the stable walking of quadruped robots, and achieve the effect of ensuring stable walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
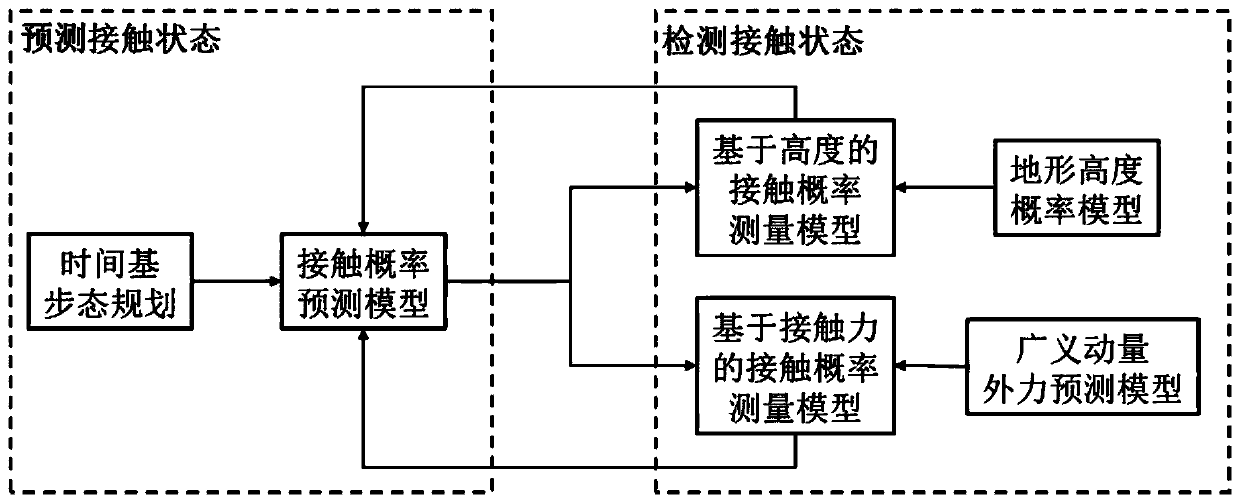
[0064] The Kalman filter detector can predict the contact state according to the time-based gait plan. After inputting the time-based gait plan into the Kalman filter detector, the estimated contact state after the robot executes the time-based gait plan is obtained. In one embodiment, as image 3 As shown in the predicted contact state side, image 3 It is a schematic diagram of the prediction and detection logic of the Kalman filter detector. The contact probability prediction model in the Kalman filter detector predicts the contact state of the time-based gait planning.
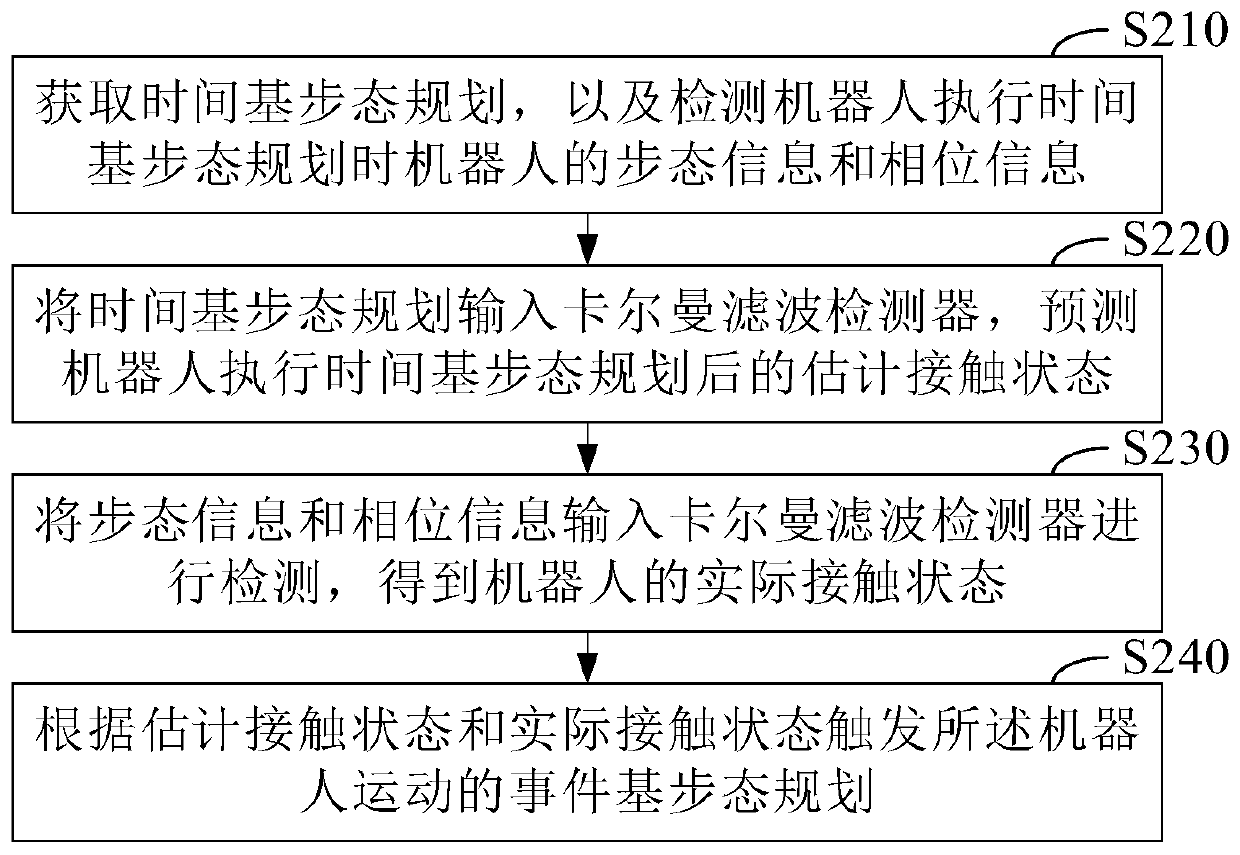
[0065] Step S230: Input the gait information and phase information into the Kalman filter detector for detection, and obtain the actual contact state of the robot.
[0066] The Kalman filter detector is constructed based on the Kalman filter, which can reduce the influence of detection errors in the gait information and phase information on the actual contact state.
[0067] According to the gait inform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More