

Active compliance control method for foot-type robot under complex terrains
A complex terrain, active compliance technology, applied in the direction of non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve problems such as slipping, falling, and unstable gait
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
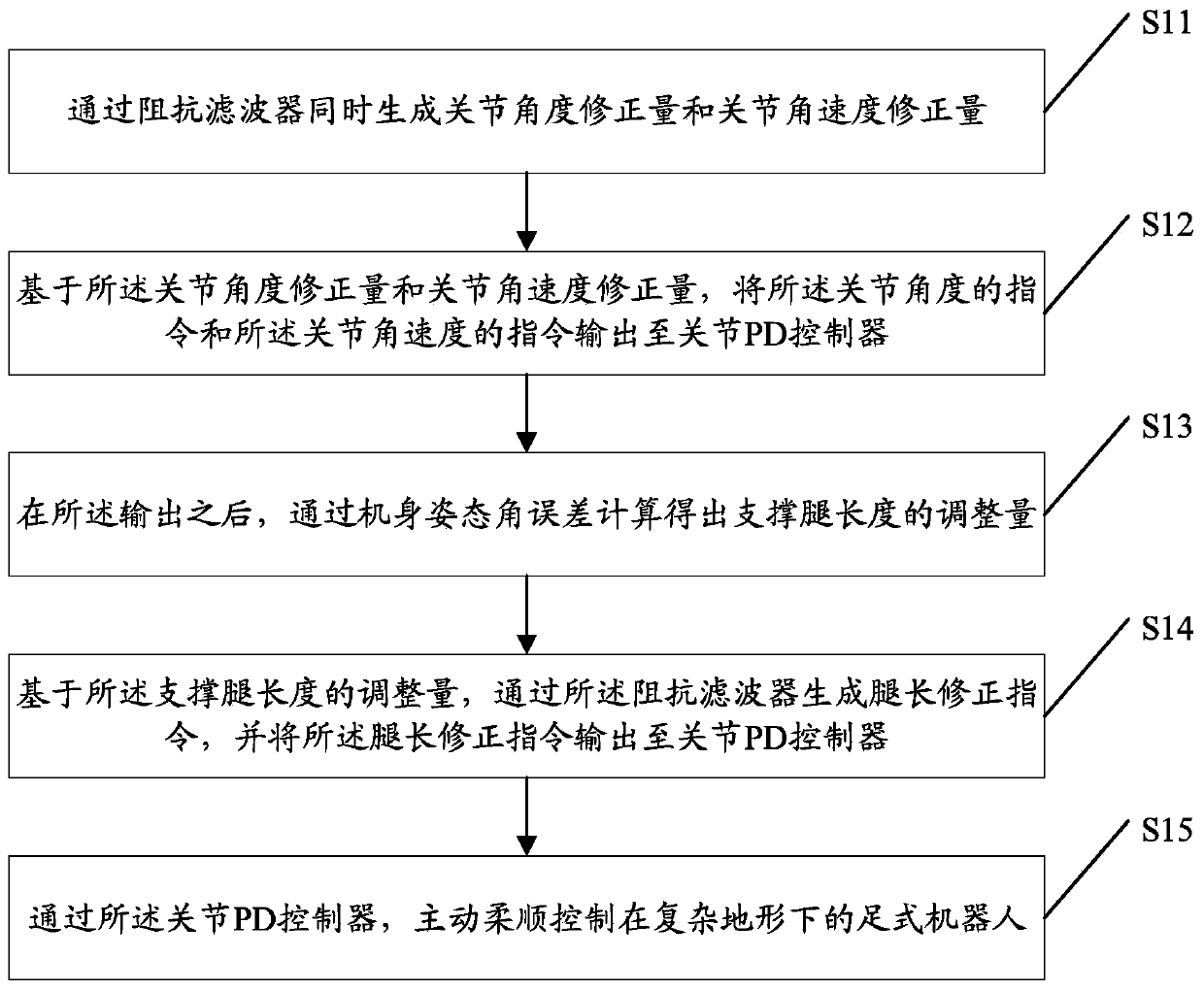
[0057] see figure 1 , figure 1 It is a schematic flow chart of the active compliance control method of the footed robot in complex terrain in the implementation of the present invention.
[0058] Such as figure 1 Shown, a kind of active compliant control method of leg type robot under complex terrain, it is characterized in that, described method comprises:
[0059] S11: Simultaneously generate a joint angle correction amount and a joint angular velocity correction amount through an impedance filter;
[0060] In the specific implementation process of the present invention, the simultaneous generation of the joint angle correction amount and the joint angular velocity correction amount through the impedance filter includes: the outer loop controller maps the contact force error of the foot end of the legged robot into the joint space; The sum integrator generates a joint angle correction amount and a joint angular velocity correction amount; according to the joint angle corr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More