

Unmanned vehicle track recording and tracking method
A trajectory tracking, unmanned vehicle technology, applied in vehicle position/route/altitude control, non-electric variable control, control/regulation system and other directions, can solve problems such as inability to receive signals, and achieve accurate tracking and strong robustness , the effect of strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
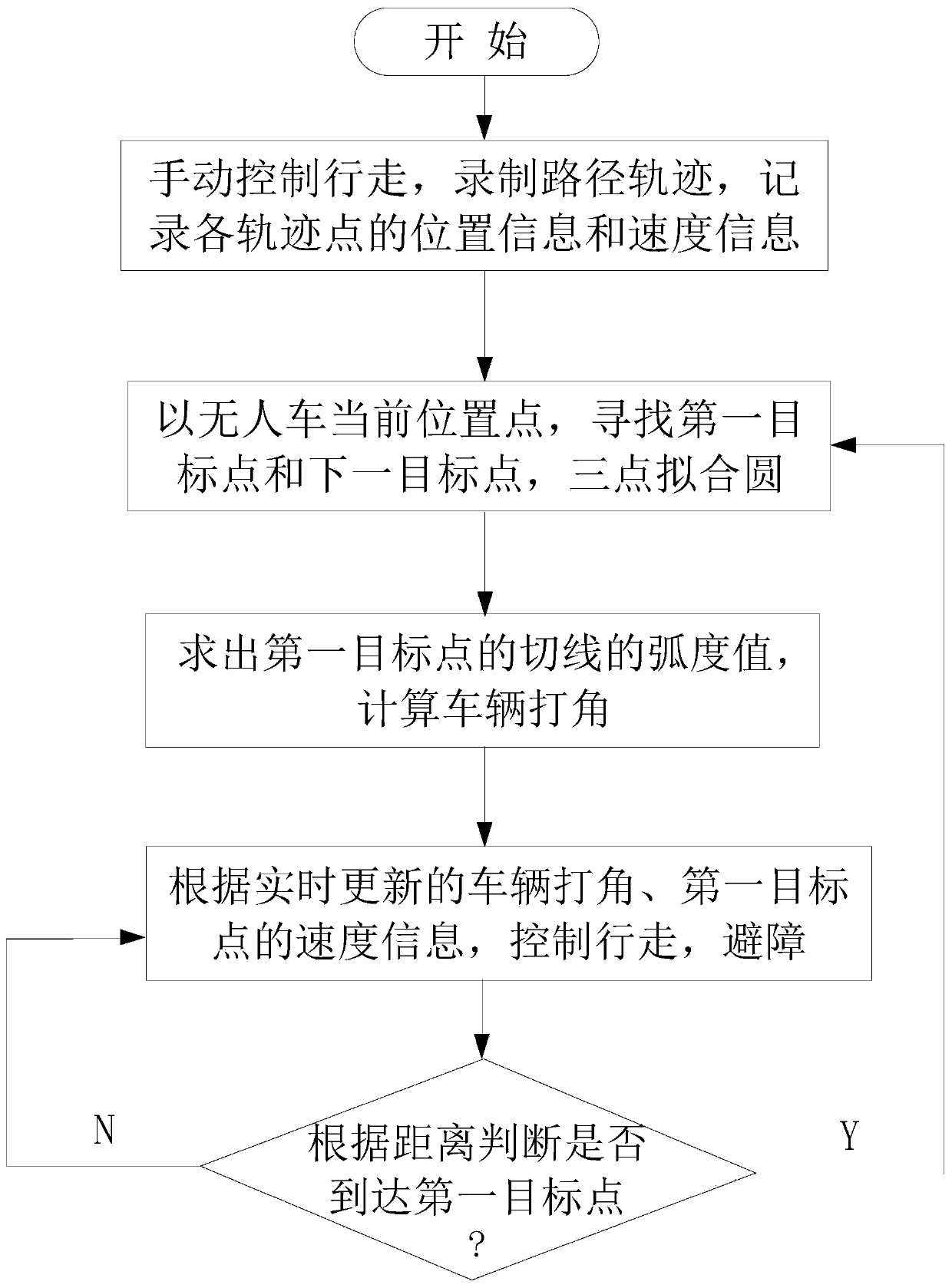
[0029] A method for track recording and track tracking of unmanned vehicles, such as figure 1 shown, including the following steps:
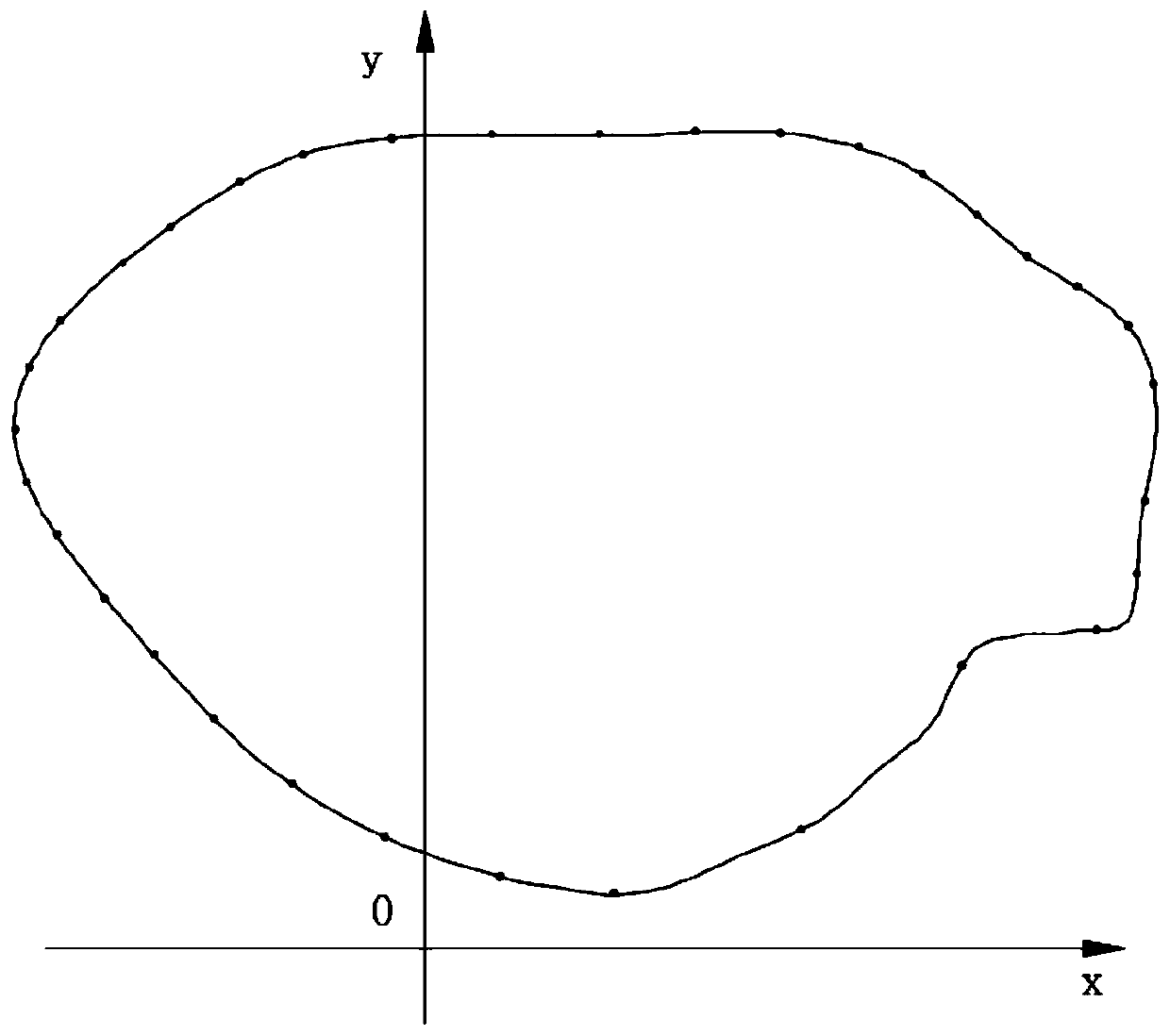
[0030] S1. Manually control the unmanned vehicle to walk, record the path trajectory, record the coordinate information and speed information of each trajectory point on the path trajectory, and form a path trajectory map with coordinates;
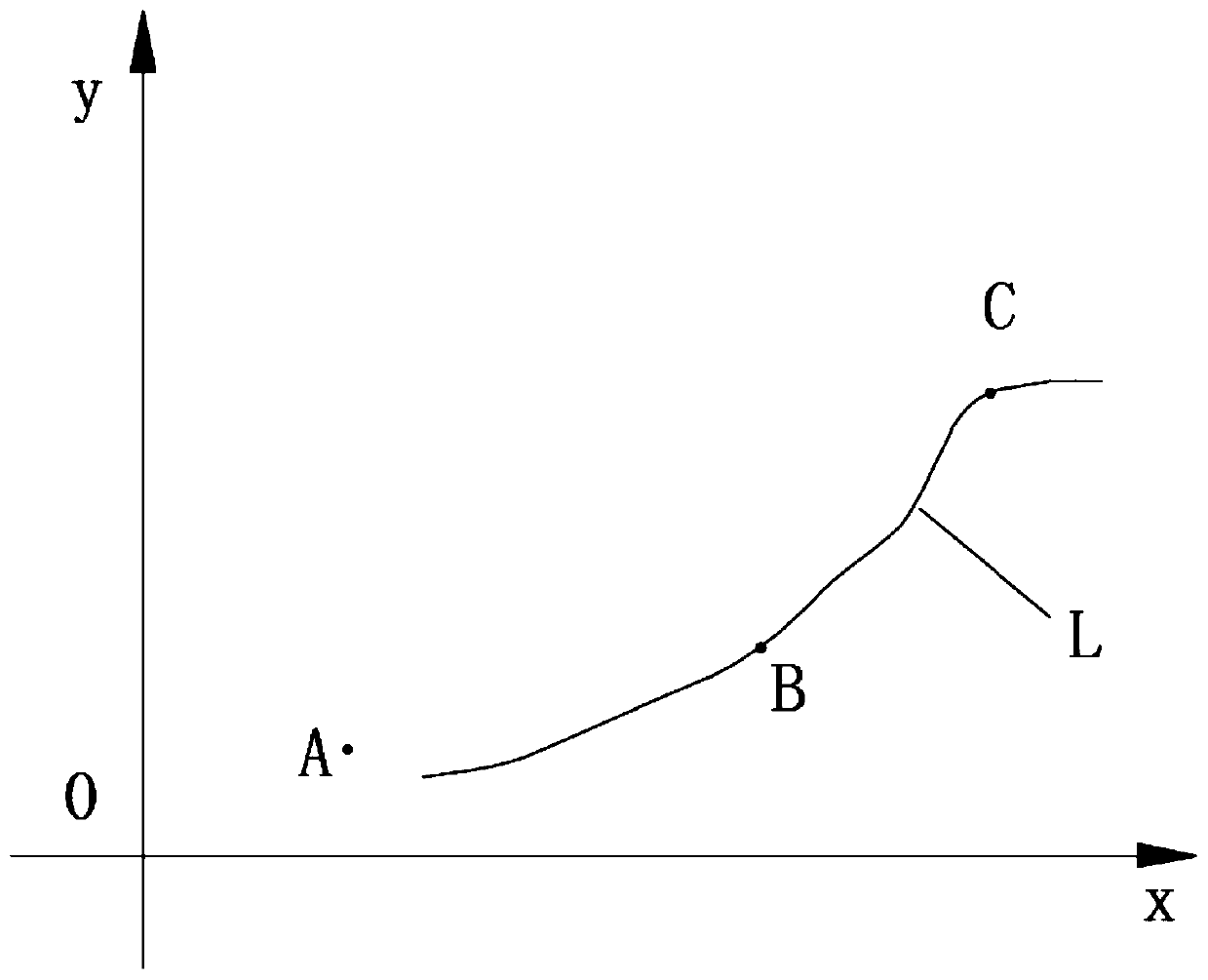
[0031] S2. According to the current position point of the unmanned vehicle on the path trajectory map, the direction of pre-walking and the recorded path trajectory, select two points from the trajectory points on the path trajectory as the first position of the unmanned vehicle respectively. The target point and the next target point, using the current position point of the unmanned vehicle, the first target point and the next target point to fit a circle passing through the three points, and obtain the center coordinates of the circle;
[0032] S3. Record the radian value of the current heading angle of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More