

Drive control system of collaborative robot
A technology of drive control and robotics, applied in the field of robotics, can solve problems such as incompleteness, achieve high security, enrich communication interfaces, and improve the effect of robot force control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
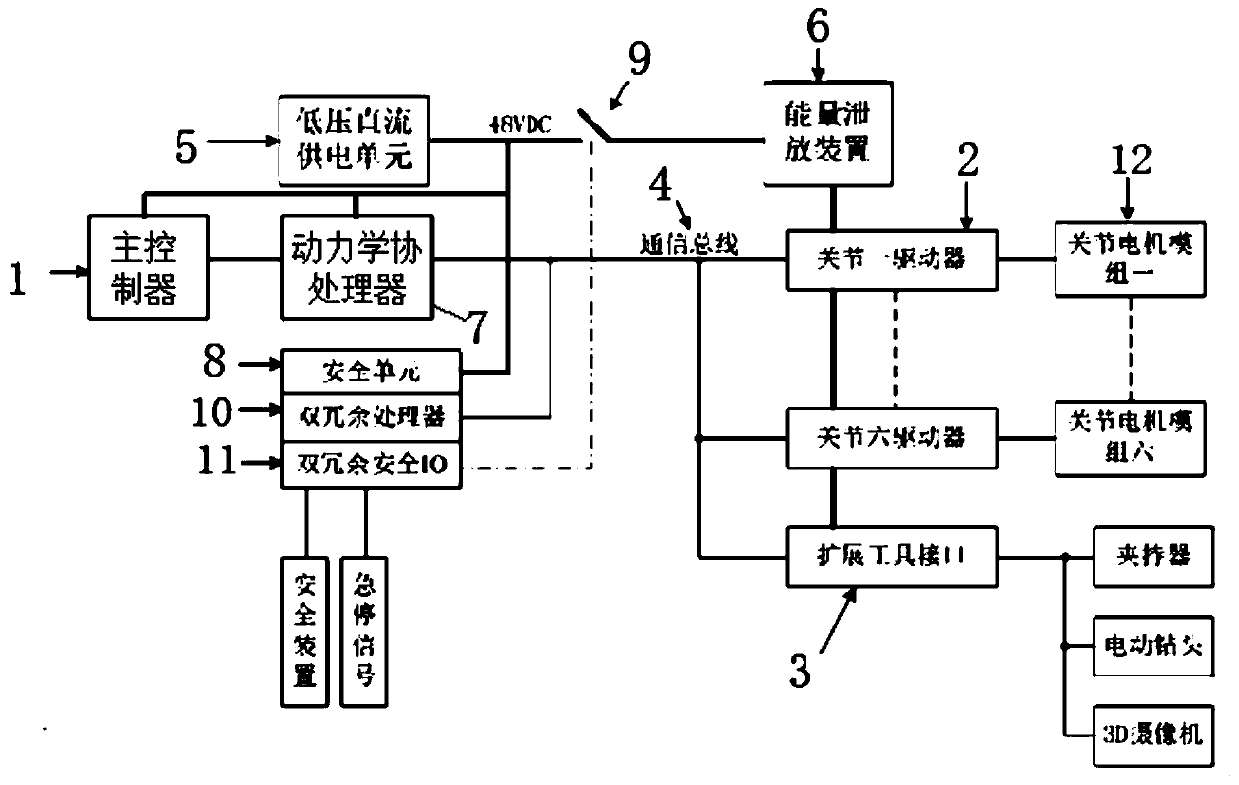
[0021] Such as figure 1 As shown, a collaborative robot drive control system includes a motion control loop, a low-voltage power supply loop and a safety control loop. The motion control loop includes a main controller 1, a dynamics coprocessor 7 and a joint motor drive controller, and the dynamics coprocessor The controller 7 is respectively connected with the main controller 1 and the joint motor drive controller, and the low-voltage power supply circuit is respectively connected with the motion control circuit and the safety control circuit.
[0022] The system integrates three loops, namely motion control loop, low-voltage power supply loop and safety control loop. The motion control loop includes a main controller 1, a dynamics coprocessor 7, and six independent robot joint drive units 2, namely joint 1 drive, joint 2 drive, joint 3 drive, joint 4 drive, joint 5 drive and joint 6 drive, Extension tool interface. The expansion tool interface 3 can be connected to auxilia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More