

Truck rollover prevention hybrid control system based on active steering and differential braking
A technology of active steering and differential braking, applied in automatic steering control components, electric steering mechanisms, brakes, etc., can solve the problems of compliance effect roll deterioration, missed rollover danger, etc., and achieve extensive anti-rollover control. time, improved safety, and the effect of good path retention
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Provide an embodiment below in conjunction with accompanying drawing.
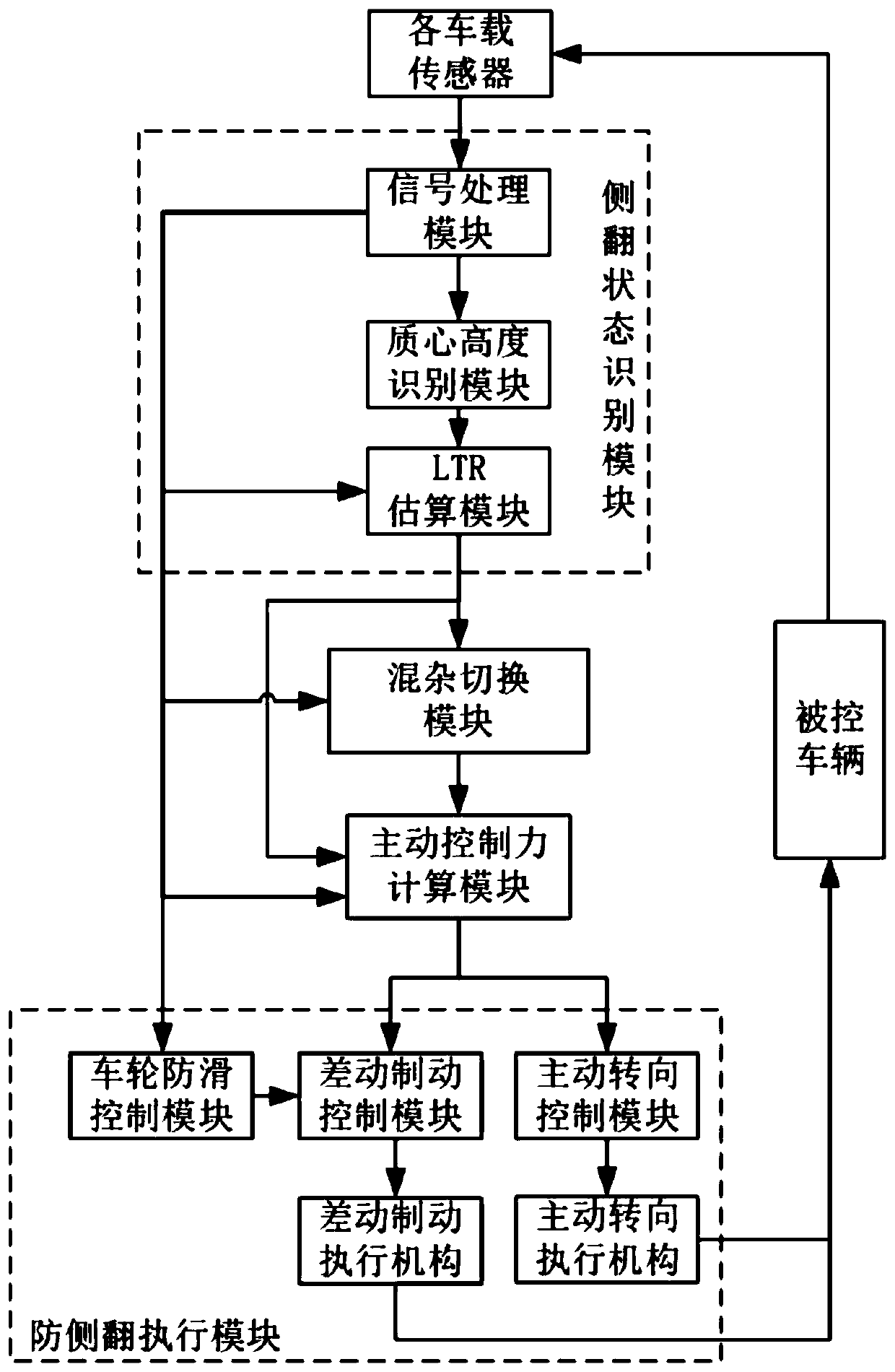
[0054] refer to Figure 1 to Figure 5, an anti-rollover hybrid control system for trucks based on active steering and differential braking, including various on-board sensors, a rollover state identification module, a hybrid switching module, an active control force calculation module, and an anti-rollover execution module. When the vehicle is running, the vehicle body lateral acceleration sensor, body yaw rate sensor and body roll angle sensor are arranged at the bottom of the cargo box, the steering wheel angle sensor is arranged on the steering column, and the wheel speed sensor is arranged on the inner side of the wheel hub to collect vehicle signals. The signal processing module in the state recognition controller performs filter processing to obtain usable vehicle state information. The centroid height identification module and the LTR estimation module use the estimation model according to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More