

Unmanned vehicle, and unmanned vehicle practical training platform and method based on AR and AI technology
An unmanned car, AR technology, applied in transportation and packaging, simulation devices and instruments of space navigation conditions, etc., can solve problems such as high cost, inability to fully restore the technical environment, difficult experiments and training and teaching applications, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0076] Unmanned car based on AR technology:
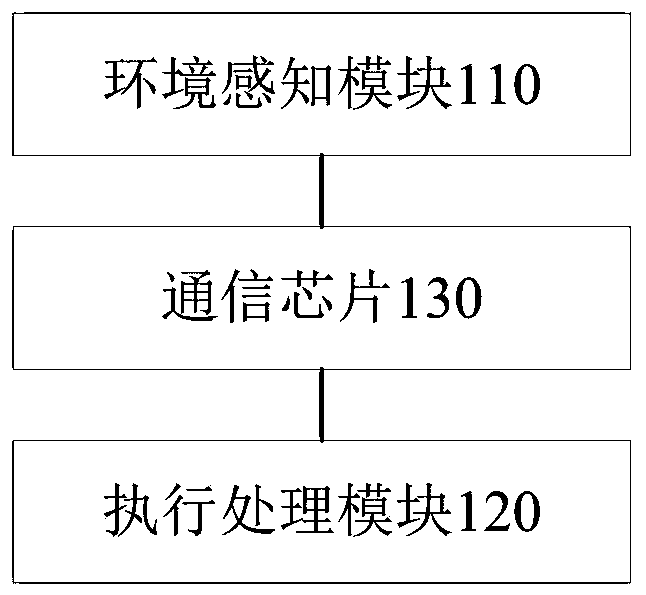
[0077] The unmanned car based on AR technology disclosed in this embodiment, such as figure 1 As shown, it includes at least: an environment perception module 110 and an execution processing module 120; wherein:
[0078] The environment perception module 110 is used to perceive the virtual scene in the virtual city environment when the unmanned car is running in the virtual city environment, and obtain the virtual scene sensing data;
[0079] The execution processing module 120 is configured to control the unmanned car to run in the virtual city environment according to the control instruction.
[0080] Preferably, the unmanned car includes a communication chip 130, which is used to send the scene sensing data to the AI control system through wired or wireless means, and is also used to receive the control instructions of the AI control system, so The AI control system described above is set on a local server / cloud server. ...
Embodiment 2
[0084] Unmanned car based on AR technology:
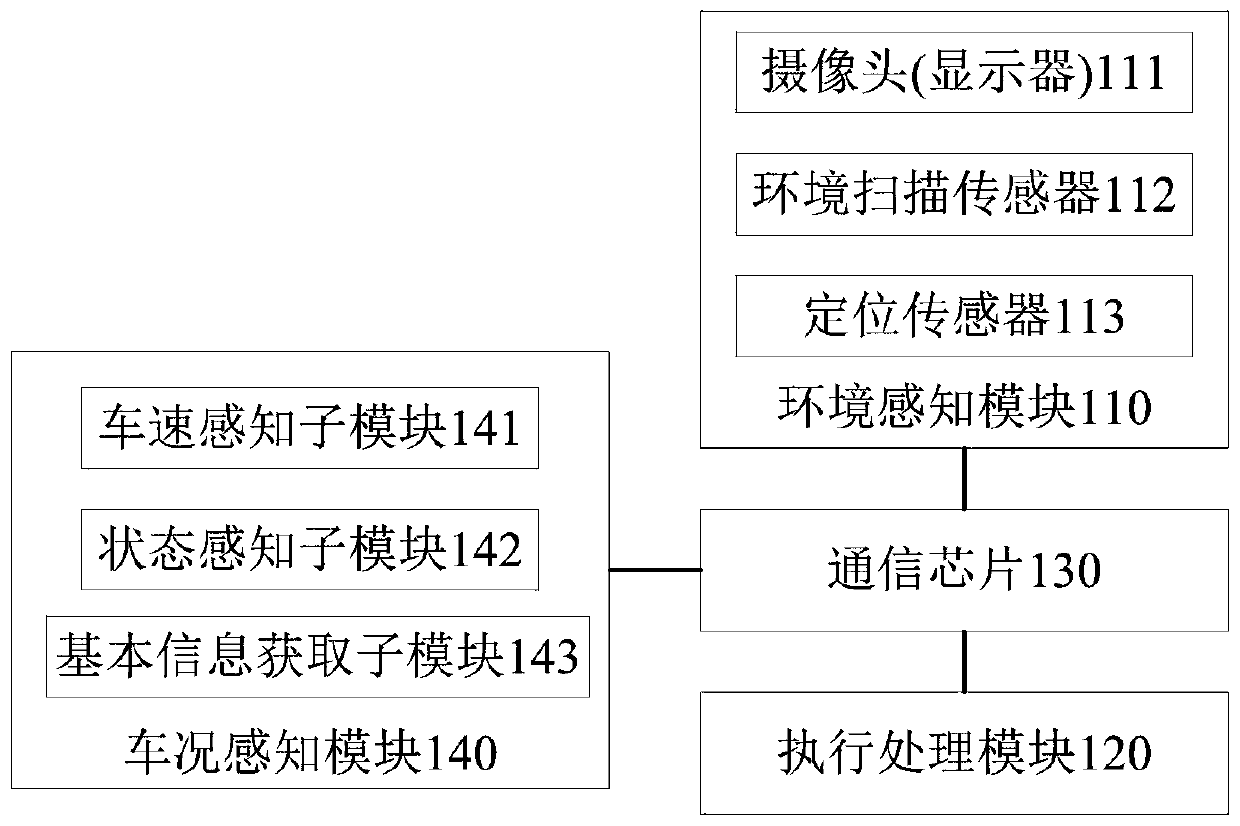
[0085] The unmanned car of the present embodiment is on the basis of embodiment one, as figure 2 As shown, the unmanned car also includes a display, and the environment perception module 110 includes a camera 111,
[0086] At least one display is set in front of the camera 111, and the display is used to display the virtual city environment; the camera 111 is used to take pictures of the current virtual scene; specifically, for example, a display is set in front of the camera. AR display device, so that the camera can capture the scene of the combination of virtual and real. Since the unmanned car is running in the virtual city environment, the camera can capture the current virtual scene picture through the current virtual environment displayed on the display. .
[0087] The picture information captured by the camera 111 is sent directly or to the AI control system through the communication chip 130 . Specifically, the captu...
Embodiment 3
[0101] AR virtual city system:
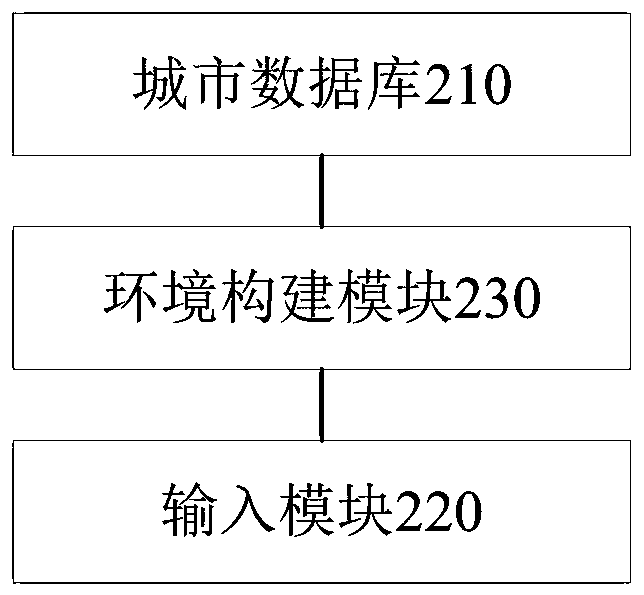
[0102] The AR virtual city system disclosed in this embodiment can be used to provide a virtual city environment for the unmanned car training of the present invention. Specifically, the AR virtual city system of this embodiment is as follows: image 3 shown, including:
[0103] City database 210, for storing various 3D maps, and for storing various 3D models for constructing the virtual city;
[0104] The input module 220 is configured to receive an environment construction instruction input by a user;
[0105] The environment building module 230 is configured to use the city database to build a virtual city environment for practical training of unmanned cars according to the environment building instructions.
[0106]In this embodiment, the city database stores materials for virtual environment construction, such as various 3D maps, etc., and the user can directly call the 3D map in the database as the virtual city environment. Of course, i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More