

Pseudo-decoupling controller and control method for four-wheel steering smart car
A decoupling controller and smart car technology, applied in the field of four-wheel steering smart car steering control, can solve the problems of not considering the change of the stability of the parameters of the controlled system and the model mismatch, paying little attention to the parameters, and having strong coupling. , to achieve high-performance control effects, stable and safe control effects, and simple methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with accompanying drawing.
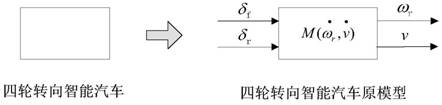
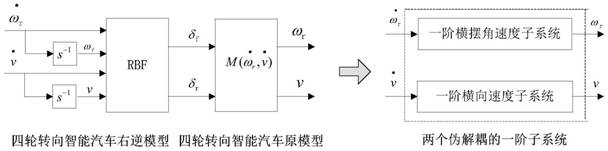
[0066] Such as figure 1 As shown, the original model of the four-wheel steering smart car is simplified and equivalent, and the original model of the four-wheel steering smart car is a two-degree-of-freedom model The parameters included in the original model of the four-wheel steering smart car are: the distance from the front wheel to the center of mass a, the distance from the rear wheel to the center of mass b, and the cornering stiffness of the front wheel k 1 , rear wheel cornering stiffness k 2 , car mass m, moment of inertia I z , Front wheel rotation angle δ f , rear wheel rotation angle δ r , longitudinal velocity u, lateral velocity v, yaw angular velocity ω r ; Four-wheel steering smart car original model The input variable of is the front wheel angle δ f , rear wheel rotation angle δ r , the control variable is the yaw rate ω r and the lateral velocit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More