

Multi-degree-of-freedom continuous robot with flexible target grabbing function
A technology of robot and degree of freedom, applied in the field of robotics, can solve problems such as immature technology, and achieve the effect of high flexibility and easy and flexible grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The idea, specific structure and technical effects of the present invention will be clearly and completely described below in conjunction with the embodiments and accompanying drawings, so as to fully understand the purpose, scheme and effect of the present invention. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
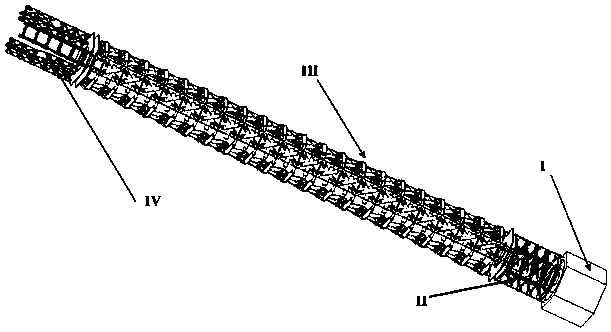
[0036] Such as figure 1 , a multi-degree-of-freedom continuous robot with the function of flexible grasping the target, including a driving module I, a rotating compression module II, a bending compression module III, and a dexterous finger module IV. A stepping motor is preferably used as the driving device 1 of the driving module I; the driving device module I and the rotary compression module II are connected through an upper connecting plate 2, and the rotating compression module II and the bending compression module III are connected thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More