

Method for resolving minimum spatial turning path of joints of mechanical arm
A technology of joint space and manipulators, which is applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of increased calculation amount, complicated process, and large amount of calculation, and achieve smooth path, avoid position mutation, and high calculation accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings and technical solutions.
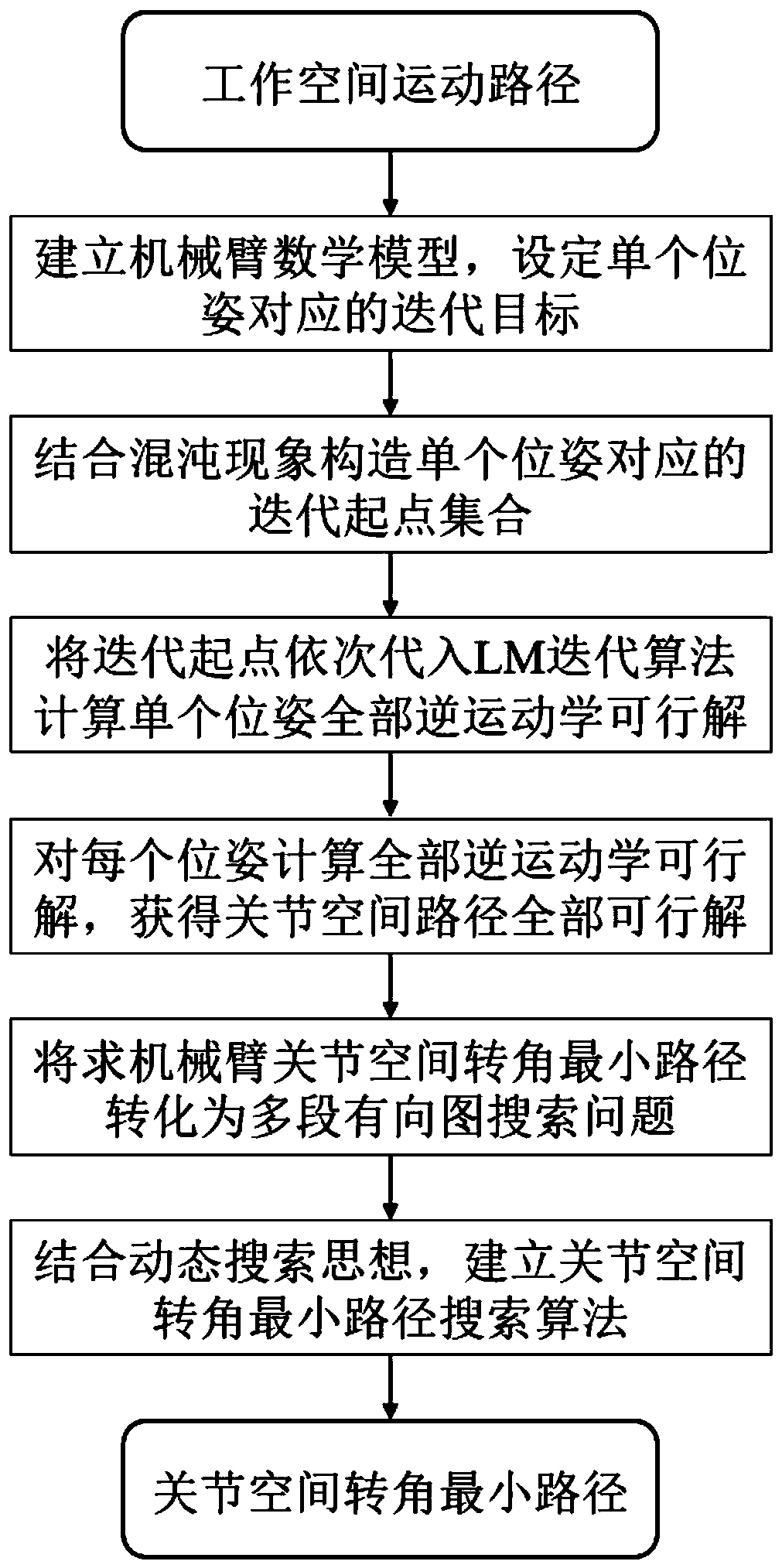
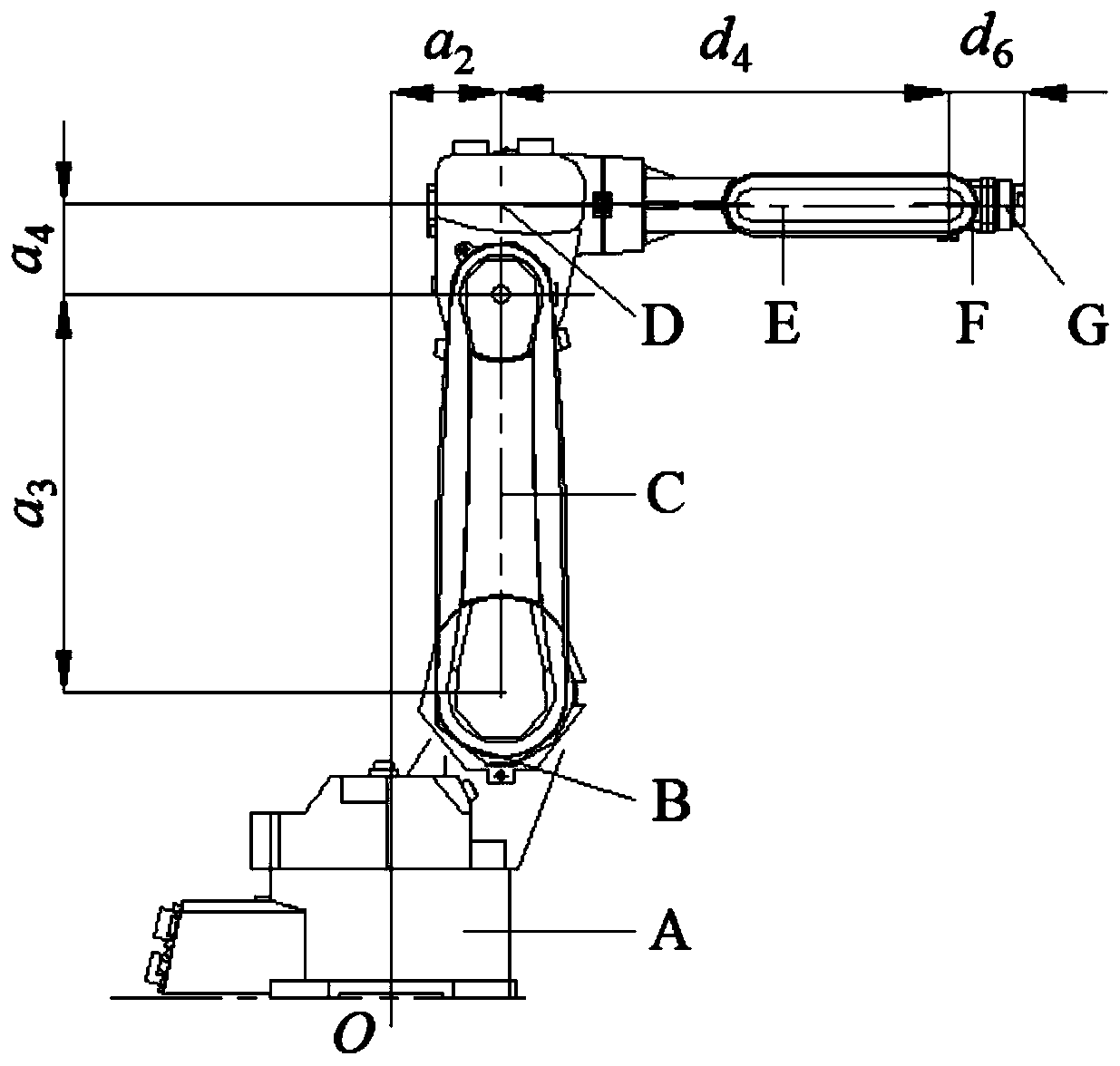
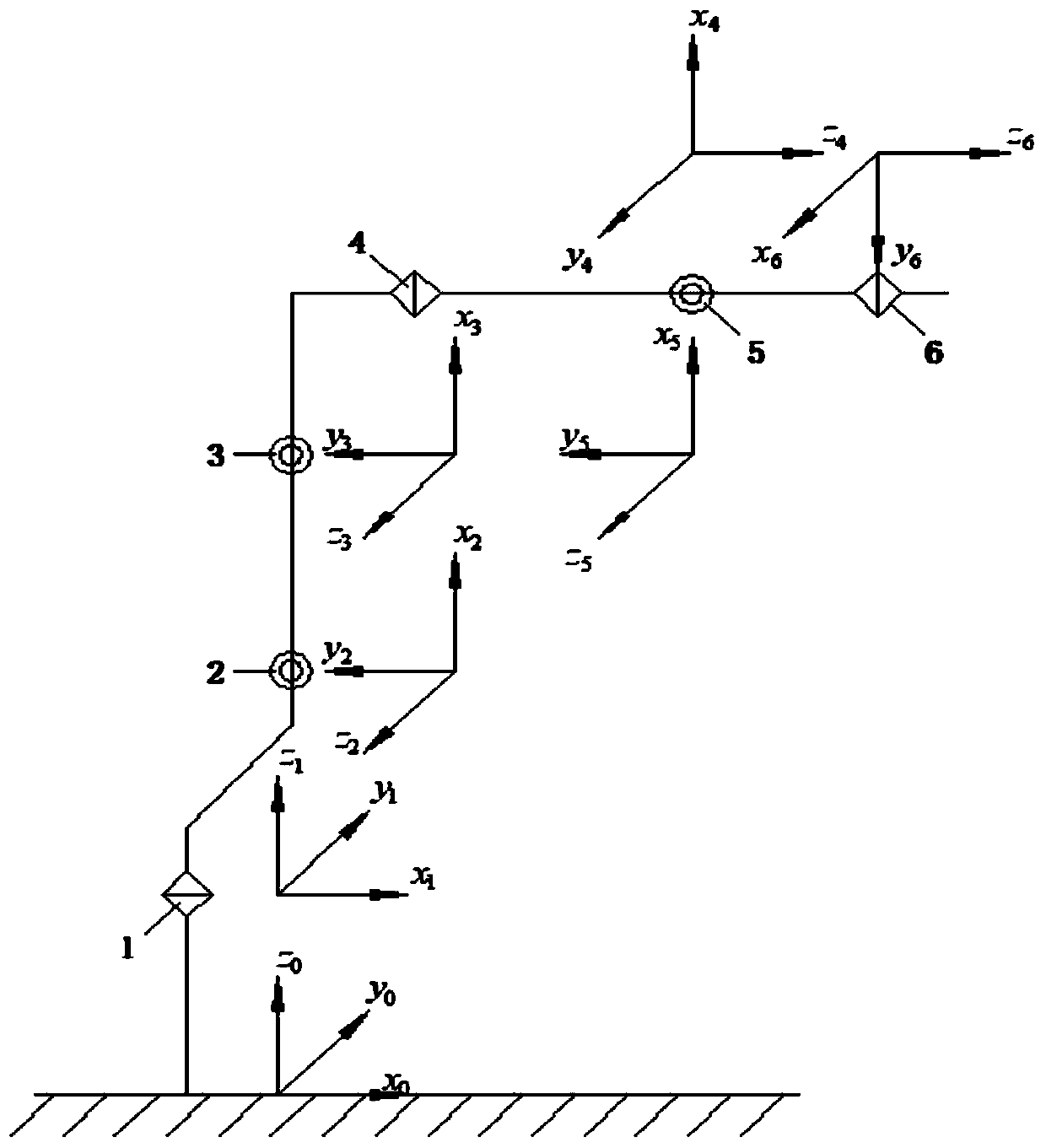
[0050] attached figure 1 It is a flow chart of the method for obtaining the minimum path of the joint space rotation angle of the general configuration manipulator of the present invention, with figure 2 It is a structural diagram of a six-degree-of-freedom general configuration manipulator. The coordinate system of each joint of the general configuration manipulator is as follows: image 3 shown. The robotic arm consists of a base A, an end effector G and 5 connecting rods, namely connecting rod 1, connecting rod 2, connecting rod 3, connecting rod 4, connecting rod 5 (B, C, D, E, F), 6 Rotation joints, namely joint 1, joint 2, joint 3, joint 4, joint 5, joint 6 (1, 2, 3, 4, 5, 6). The determination method of each coordinate system adopts the improved DH parameter method, and each joint rotates around...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More