

Flexible finger structure of robot
A flexible finger and robot technology, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems that it is difficult to adapt to rough and irregular objects, and the strength is difficult to control, etc., and achieve the effect of wide application range, low cost, and good bending effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
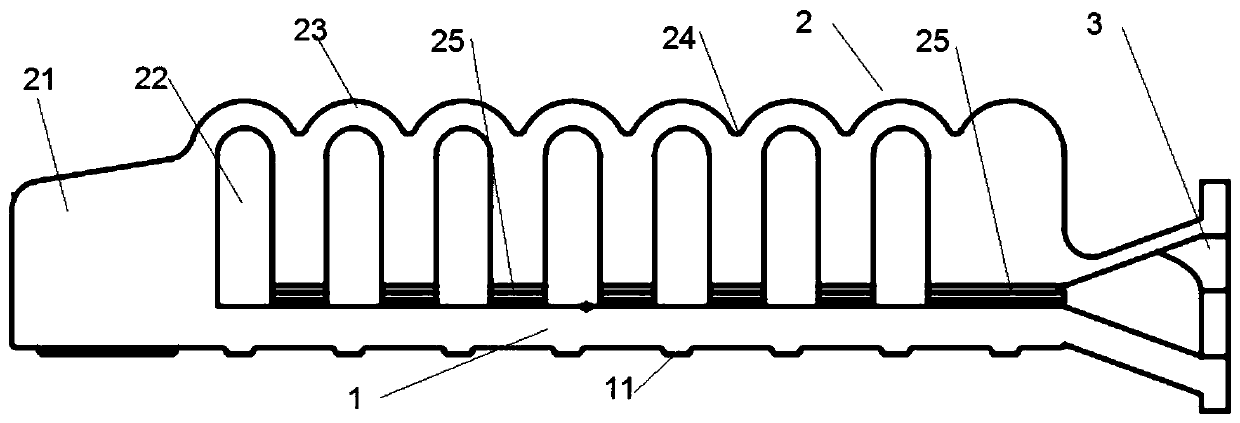
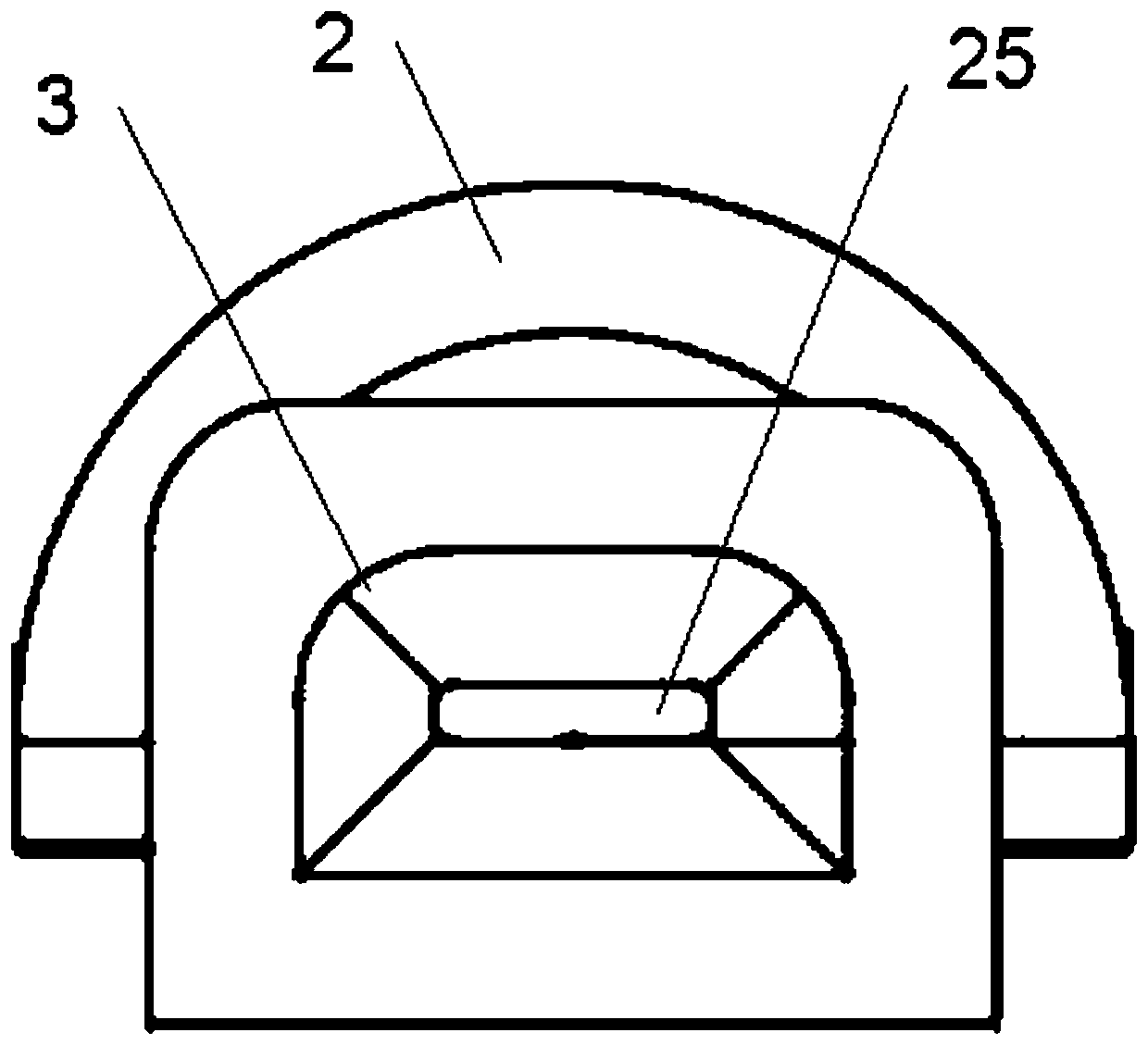
[0022] refer to Figure 1-5 As shown, a robot flexible finger structure includes a finger body, and the finger body includes a finger bottom plate 1 and a finger finger surface 2, and the finger finger surface 2 is connected to one side of the finger bottom plate 1, and the finger finger surface Surface 2 includes fingertip 21, knuckle and root of finger. Air inlet 3 is arranged on the base of finger. The knuckle part includes finger peak 23 and finger valley 24. A plurality of flat semicircular shapes are arranged inside the knuckle part. The air cavity 22, a plurality of the air cavities 22 are communicated through an air passage 25, and the deformation of the finger base 1 is s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More