

Bridge crane positioning and anti-swing control method for achieving random parking
A random position, crane technology, applied in the direction of load hanging components, transportation and packaging, can solve problems affecting work efficiency, safety hazards, affecting lifting efficiency, etc., and achieve the effect of random parking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
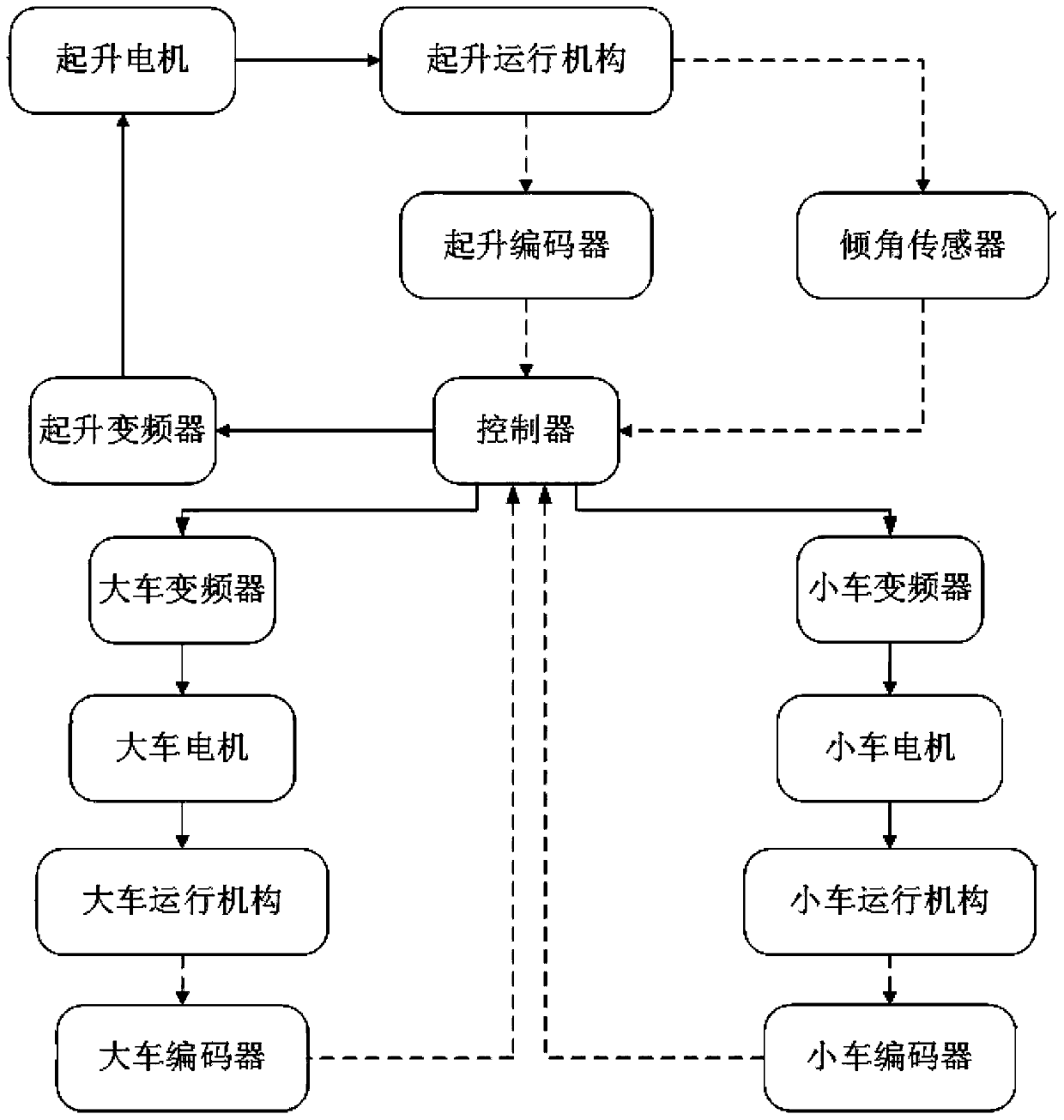
[0022] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
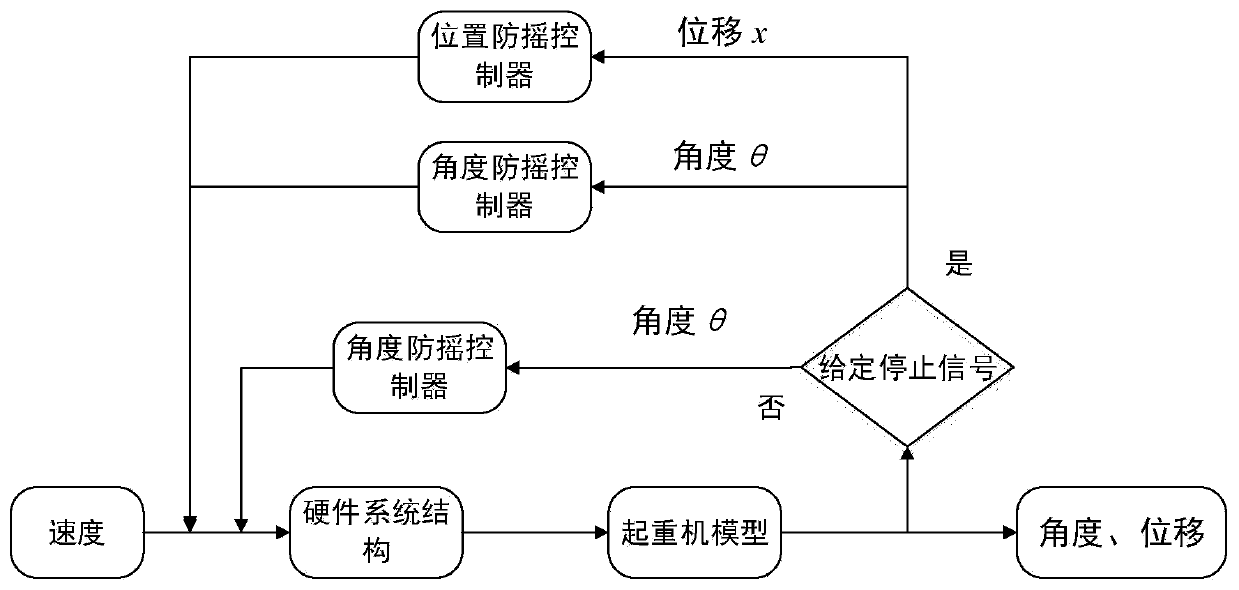
[0023] like figure 1 As shown, the control system used in the positioning and anti-sway control method of an overhead crane that can realize random position parking includes a controller, a lifting frequency converter, a lifting motor, a lifting operating mechanism, a lifting encoder, and an inclination sensor. , Cart inverter, trolley inverter, cart motor, trolley motor, cart operating mechanism, trolley operating mechanism, cart speed encoder, trolley speed encoder, etc. Before the stop signal is given, the controller measures the load swing angle and rope length in real time according to the expected running speed set by the cart and trolley, and the inclination sensor and the hoist encoder perform single closed-loop control; after the stop signal is given, set this time The displacement of the cart and trolley is zero, and the running displacemen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More