

Sweeping robot edge sweeping method based on inertial navigation
A technology of sweeping robot and inertial navigation, applied in the field of edge-sweeping robot sweeping based on inertial navigation, can solve the problems of inability to effectively handle the circle cycle process, inability to adapt to different color walls, and short life of collision sensors, etc. Detects the effects of rapidity, good robustness and adaptability, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] A sweeping robot cleaning method along the edge based on inertial navigation, see figure 1 , figure 2 , image 3 , including the following steps:
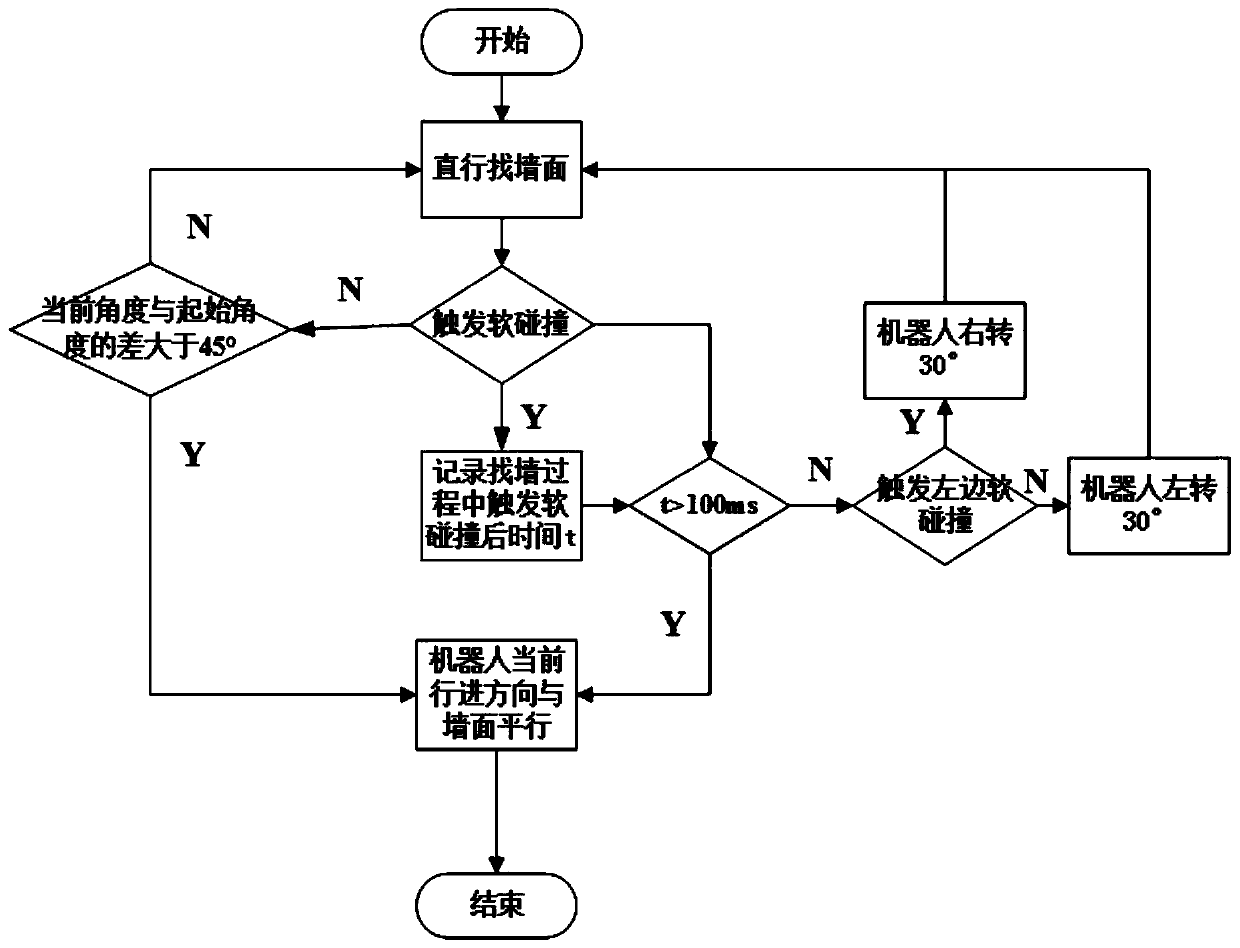
[0039] S1. The sweeping robot enters the initial state and walks in a straight line at full speed in the current direction until it triggers the hard collision sensor located at the front of the sweeping robot. Realized by three infrared sensors at the front end of the sweeping robot;
[0040] S2. The hard collision sensor feeds back to the control module. The control module controls the sweeping robot to retreat at full speed by 15mm, and then finds the wall according to the set angle of turning in the opposite direction along the wall. The clock hand turns 30°), the control module synchronously sends scanning signals to multiple soft collision sensors located at the front end of the sweeping robot, and multiple soft collision sensors feed back the trigger time t, current angle and initial trigger angle of the wall-find...
Embodiment 2
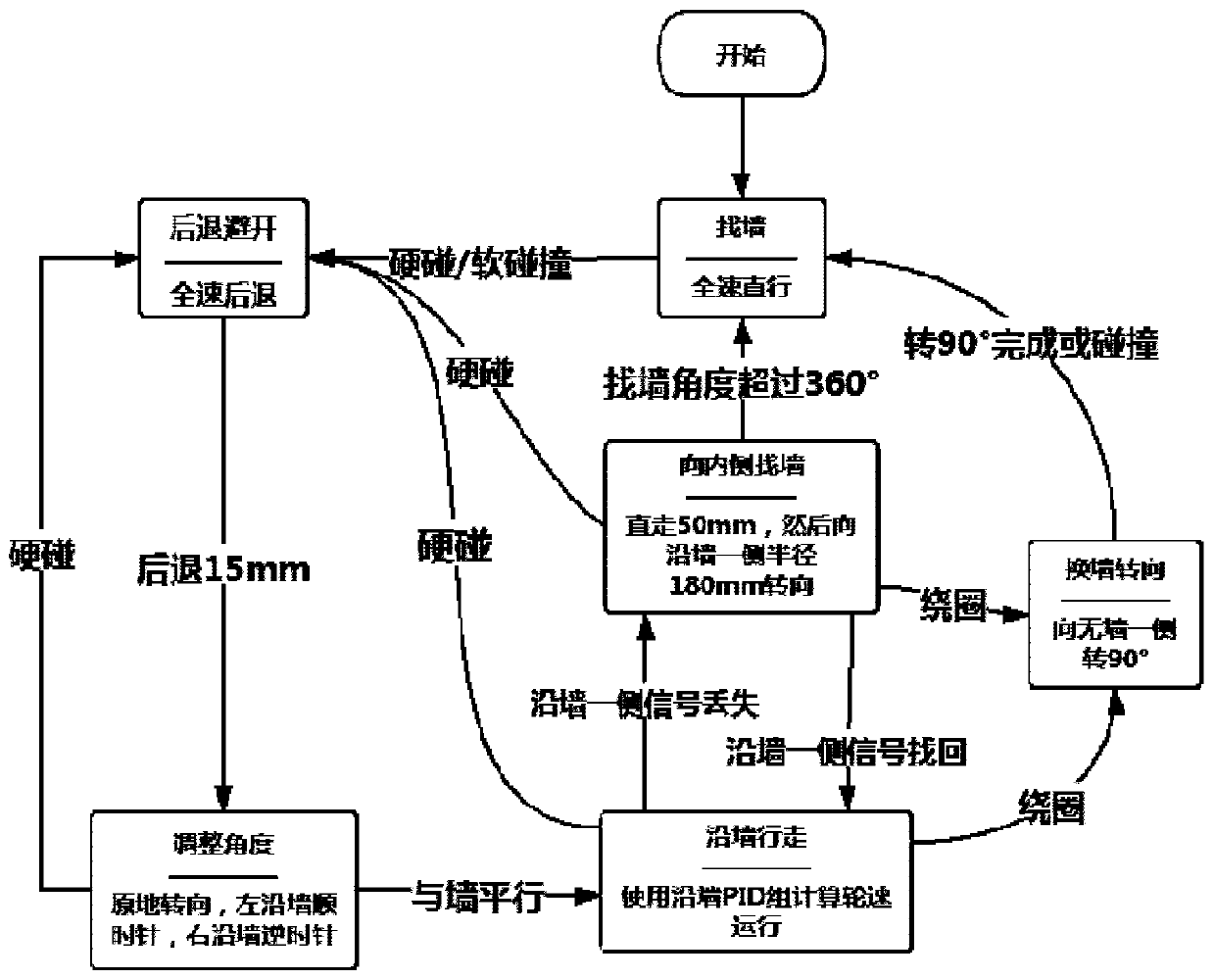
[0067] (1) Turn on the sweeping robot; see figure 1 ;
[0068] (2) The sweeping robot starts to walk in a straight line at full speed to find the wall until a hard or soft collision is triggered;
[0069] (3) The sweeping robot retreats 15mm at full speed to avoid;
[0070] (4) The sweeping robot adjusts the angle, turns on the spot, turns left along the wall clockwise, and right turns counterclockwise along the wall. If a hard collision is triggered, execute (3), otherwise until it is parallel to the wall;
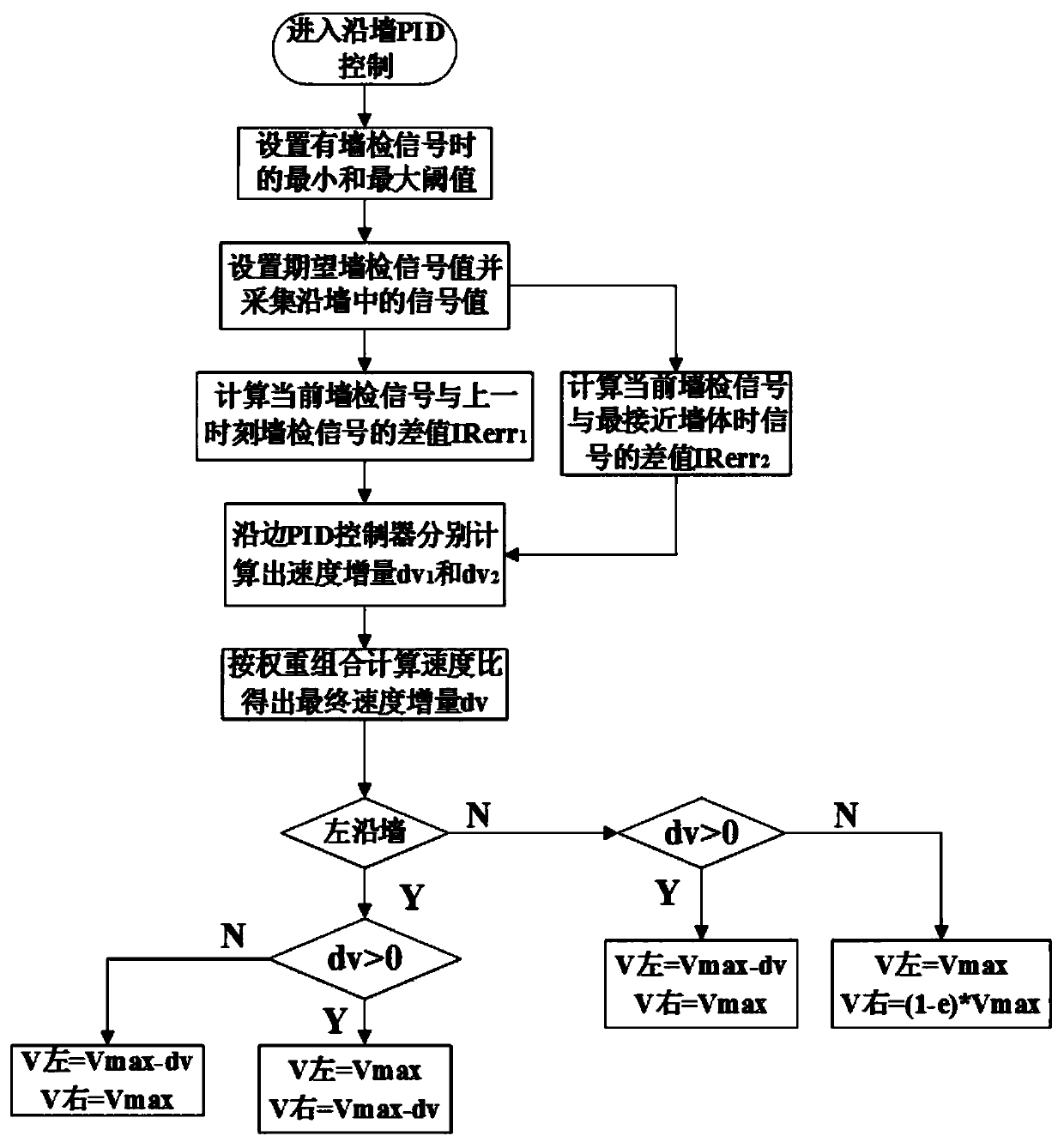
[0071] (5) The sweeping robot calls the PID module along the wall to calculate the wheel speed to walk along the wall. If a hard collision occurs, execute (3). If it is judged to be circling, execute (7). If the signal along the wall is lost, execute ( 6);
[0072] (6) The sweeping robot looks for the wall inside, walks straight for 50mm, and then turns to the side along the wall with a radius of 180mm. If a hard collision occurs, execute (3). If the signal is recovere...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More