

Automatic driving control method and device, vehicle and storage medium
A technology of automatic driving control and automatic driving, which is applied in the direction of control devices, non-electric variable control, motor vehicles, etc., and can solve the problems of a large number of artificial labels and samples, the inability to realize independent decision-making, and the inability to realize
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
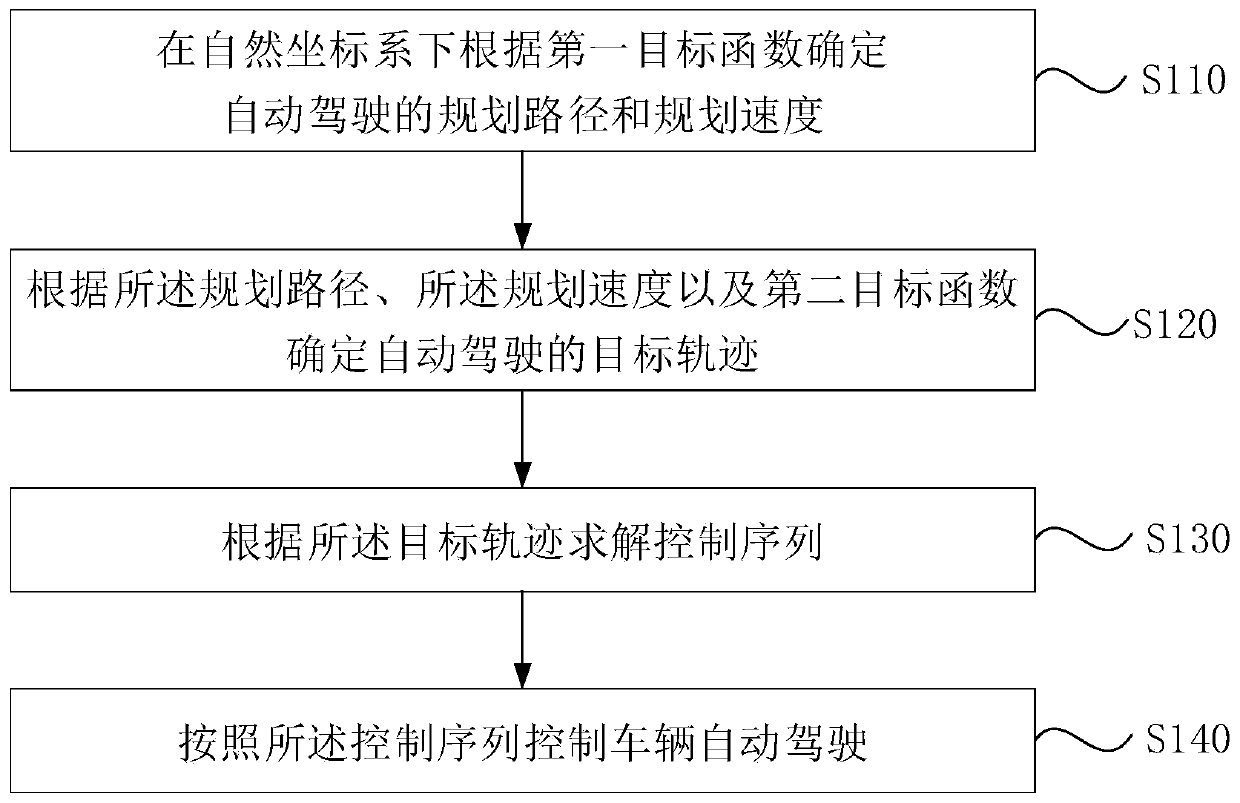
[0051] figure 1 It is a flow chart of an automatic driving control method provided in Embodiment 1 of the present invention. This embodiment is applicable to the situation where automatic driving of the vehicle is realized by predicting and controlling the trajectory and state of the vehicle. Specifically, the automatic driving control method can be executed by an automatic driving control device, which can be realized by means of software and / or hardware, and integrated in the vehicle.
[0052] Such as figure 1 As shown, the method specifically includes the following steps:
[0053] S110. Determine the planned route and planned speed of the automatic driving according to the first objective function in the natural coordinate system.
[0054]Specifically, calculations are usually performed based on the Cartesian coordinate system in path planning, but this embodiment considers that autonomous driving is on a structured road scene, and it is difficult to establish objective ...
Embodiment 2
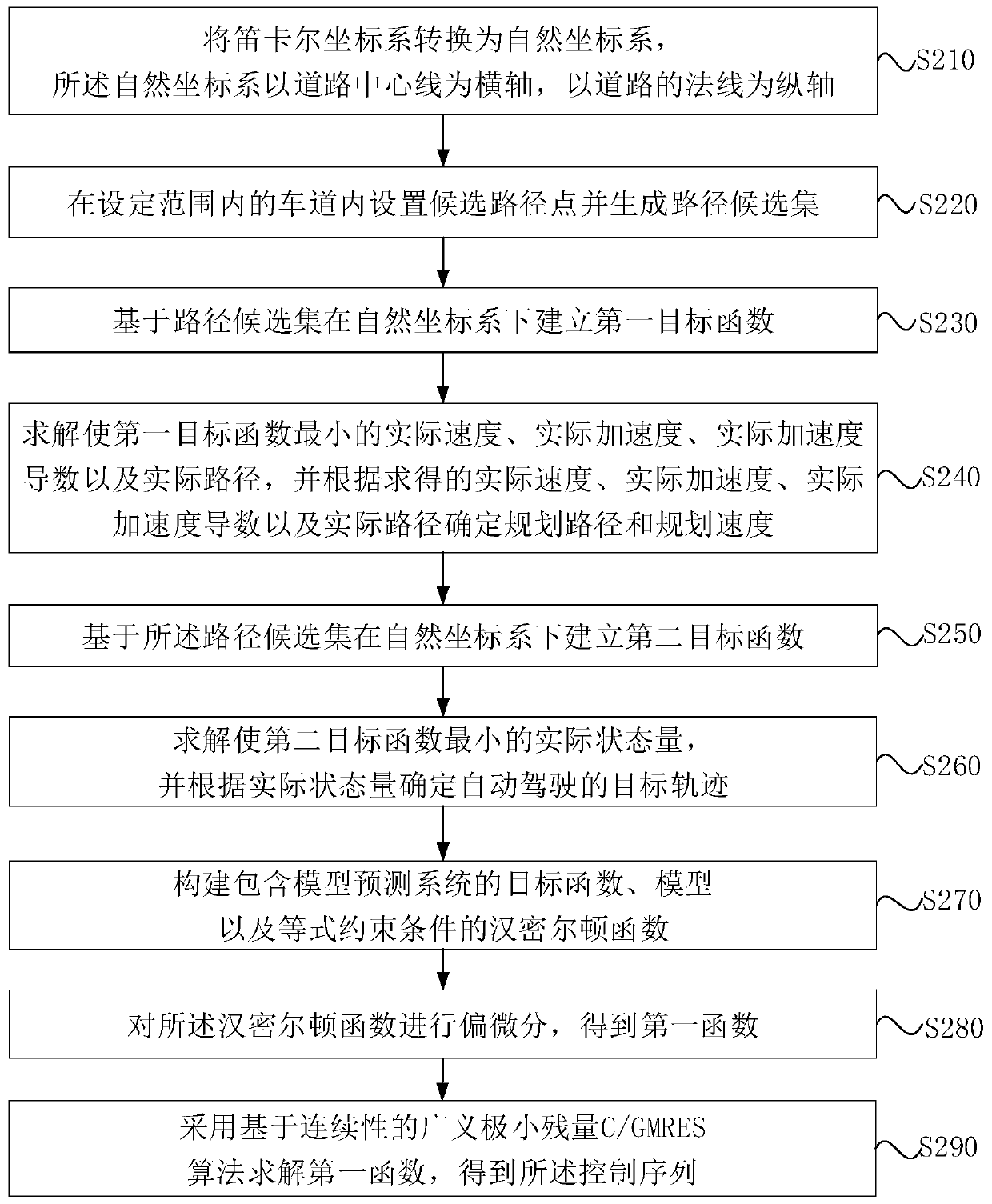
[0066] image 3 It is a flow chart of an automatic driving control method provided by Embodiment 2 of the present invention. This embodiment optimizes on the basis of the above embodiments, and specifically describes the process of solving each objective function and control sequence. It should be noted that for technical details not exhaustively described in this embodiment, reference may be made to any of the foregoing embodiments.
[0067] Specifically, such as image 3 As shown, the method specifically includes the following steps:
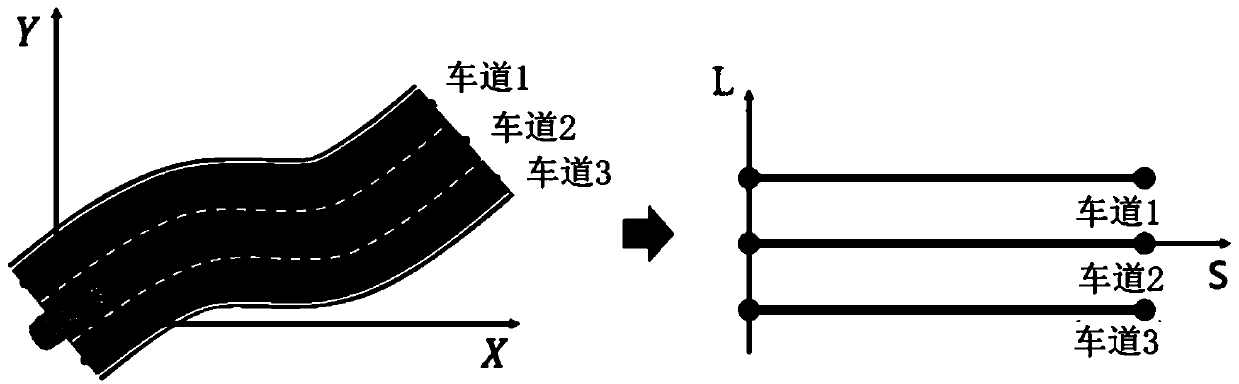
[0068] S210. Transform the Cartesian coordinate system into a natural coordinate system, where the natural coordinate system takes the centerline of the road as the horizontal axis and the normal line of the road as the vertical axis.
[0069] S220. Set candidate path points in the lanes within the set range and generate a path candidate set.
[0070] Specifically, firstly, the conditions of each lane within a certain range are synthesized ...
Embodiment 3
[0098] Figure 10 It is a schematic structural diagram of an automatic driving control device provided in Embodiment 3 of the present invention. The automatic driving control device provided in this embodiment includes:
[0099] The behavior planning module 310 is used to determine the planned route and planned speed of automatic driving according to the first objective function in the natural coordinate system;
[0100] A trajectory determination module 320, configured to determine a target trajectory for automatic driving according to the planned path, the planned speed, and a second objective function;
[0101] A sequence solving module 330, configured to solve the control sequence according to the target trajectory;
[0102] The control module 340 is configured to control the automatic driving of the vehicle according to the control sequence.
[0103] In the automatic driving control device provided by the third embodiment of the present invention, the planned path and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More