

Buoyancy matching calculation method for large-depth underwater robot
An underwater robot and matching calculation technology, applied in underwater ships, underwater operation equipment, instruments, etc., can solve the problem of complex buoyancy adjustment system, affecting navigation efficiency, fixed-point operation ability, and unsuitable for small unmanned underwater robots, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0049] The buoyancy configuration is very important for underwater robots. The neutral buoyancy of ARV is the best point for navigation and operation efficiency. The greater the deviation of ARV buoyancy configuration, the greater the vertical component that the propeller needs to provide, and the lower the navigation efficiency of the robot. This paper studies the buoyancy trim calculation, so only the force in the vertical direction of the robot is considered.
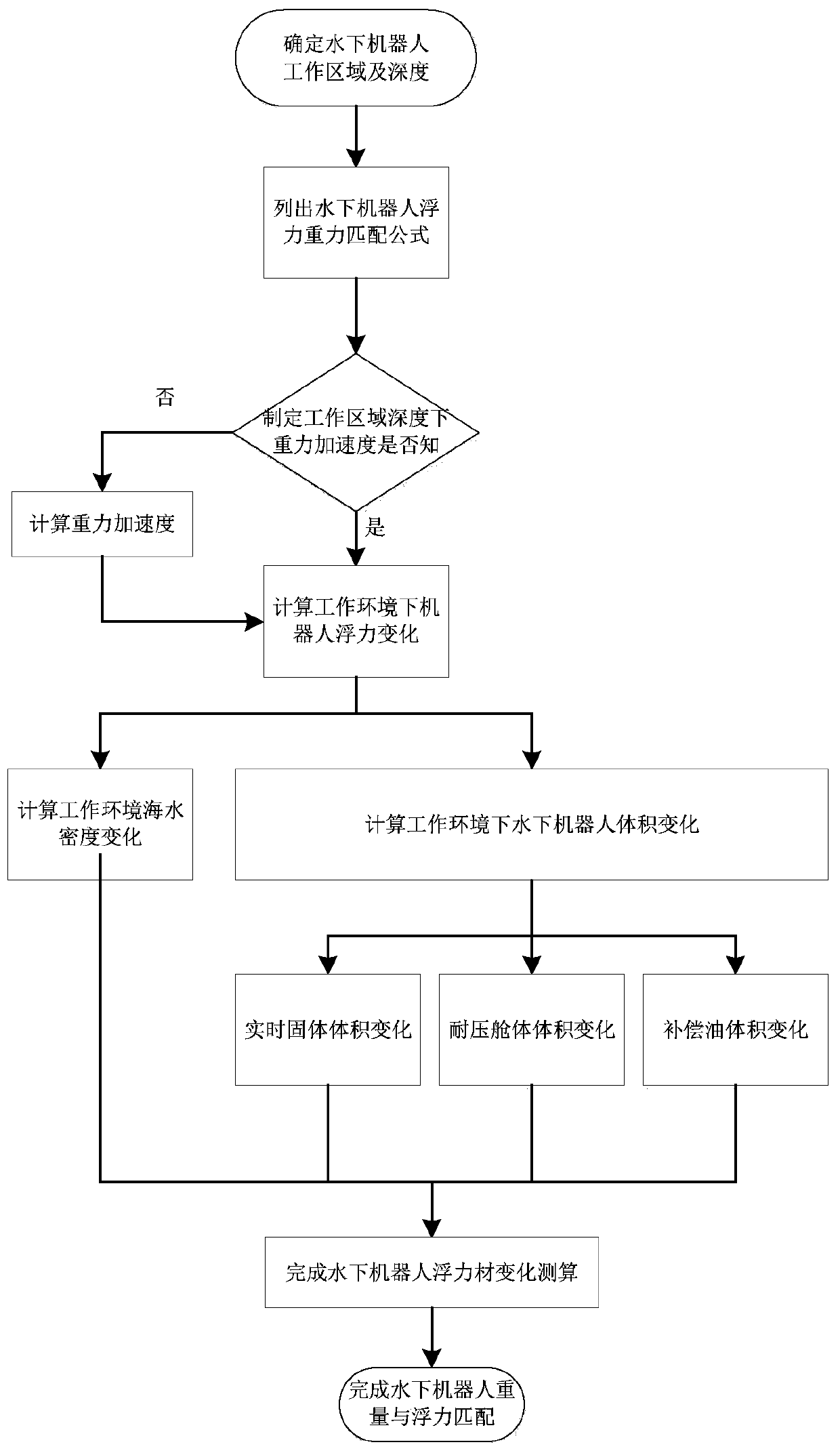
[0050] like figure 1 As shown, the method flow steps include:
[0051] Step 1: Determine the parameters of the marine underwater robot itself, as well as its working area and depth;
[0052] Step 2: Stress analysis to establish the gravity-buoyancy balance equation in the vertical direction of the underwater robot at the working depth;
[0053] Step 3: Estimate the gravitational a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More