A vision intelligent robot control system based on real-time analysis
A robot and real-time technology, applied in the general control system, control/regulation system, computer control, etc., can solve problems such as inability to adapt to the external environment and complex environment, weak vitality of the visual intelligence system, and failure to work normally.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
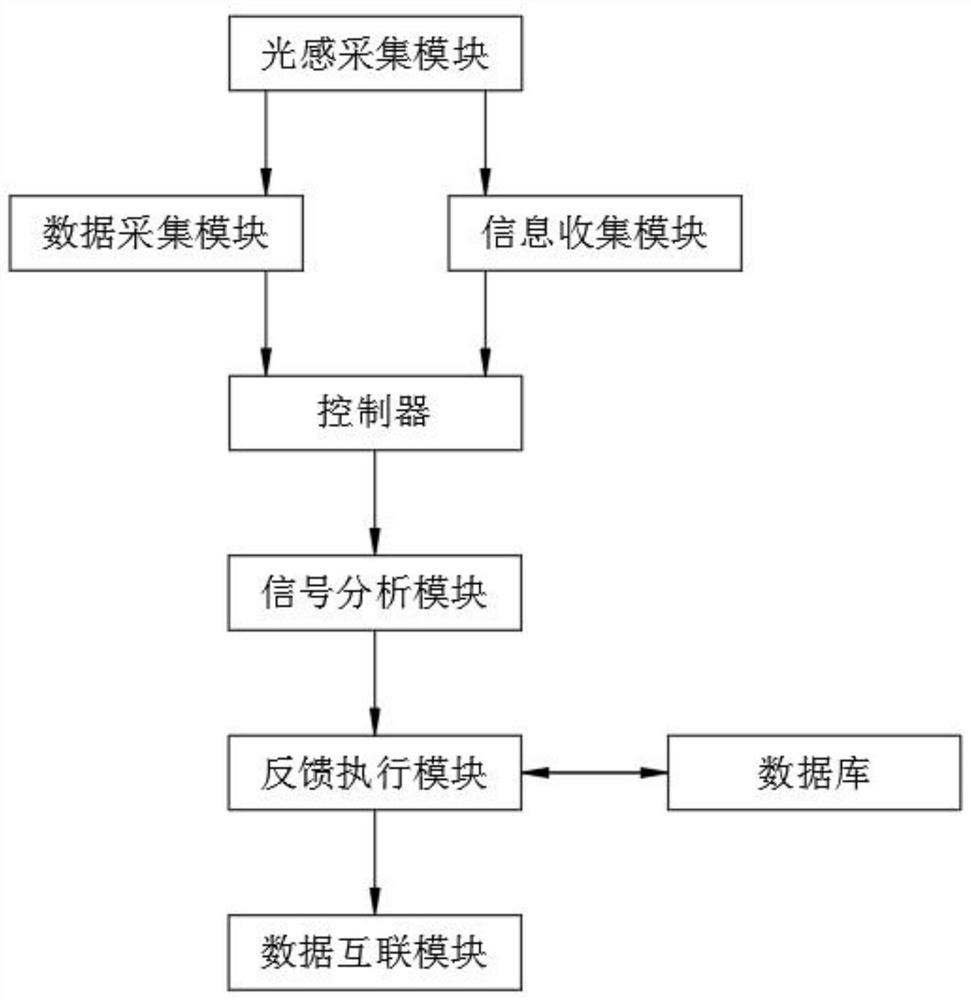
[0041] Such as figure 1 As shown, a visual intelligent robot control system based on real-time analysis, including a light sensing acquisition module, a data acquisition module, an information collection module, a controller, a signal analysis module, a feedback execution module, a database and a data interconnection module;
[0042] The light sensing acquisition module is used to collect the external light interference information of the visual robot in real time. The external light interference information of the visual robot consists of light intensity, incident angle and light distance, and transmits it to the data acquisition module and information collection module;
[0043] The data acquisition module is used to collect the internal working condition interference information of the visual robot in real time. The internal working condition interference information of the visual robot consists of the current magnification, dark leakage level and shooting target distance, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com