

Robot drag teaching method and system based on mode control
A technology of drag teaching and mode control, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc. It can solve the dead zone of large motion, does not consider the position of the robot, the teaching force exceeds the specified range, and reduces the sensitivity of drag teaching and accuracy issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
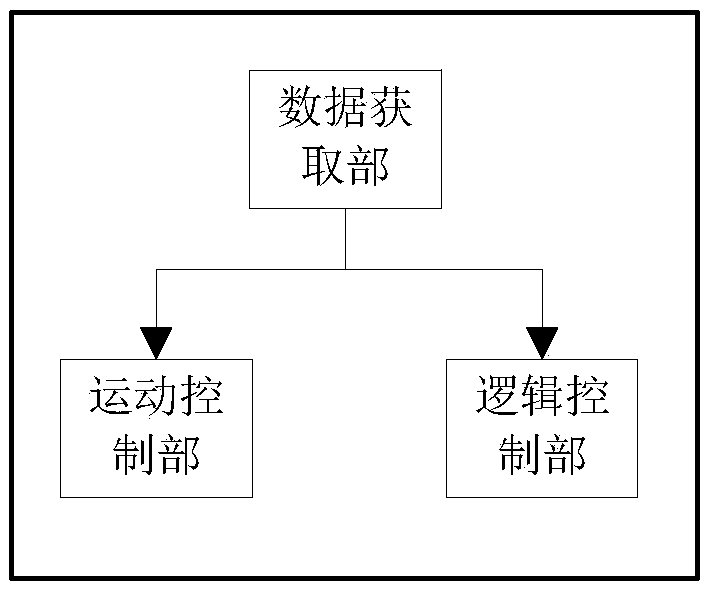
[0048] as attached Figure 1-5 As shown, the robot drag teaching system based on mode control includes three main parts: data acquisition part, logic control part and motion control part. The three parts can be run in different tasks or placed in the same task The motion control department is responsible for the real-time motion interpolation of the robot, so it needs to be run in a real-time task, for example, in a hard real-time task with a period of 1ms.
[0049] ·Data Acquisition Department
[0050] The data acquisition unit acquires various data required by the system, such as the actual joint position P of the robot r , the actual joint speed V r , joint current I r And the teaching force F exerted on the robot body by the outside world. For a robot system using the Ehtercat bus architecture, the encoder readings of the motor and the joint motor current can be easily obtained through the bus, and the joint position P can be calculated through simple multiplication an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More