

AGV space obstacle avoidance method and system based on 3D vision
An obstacle avoidance and 3D technology, applied in the field of computer vision, can solve the problems of large amount of data calculation, poor accuracy, and poor real-time detection of obstacle avoidance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
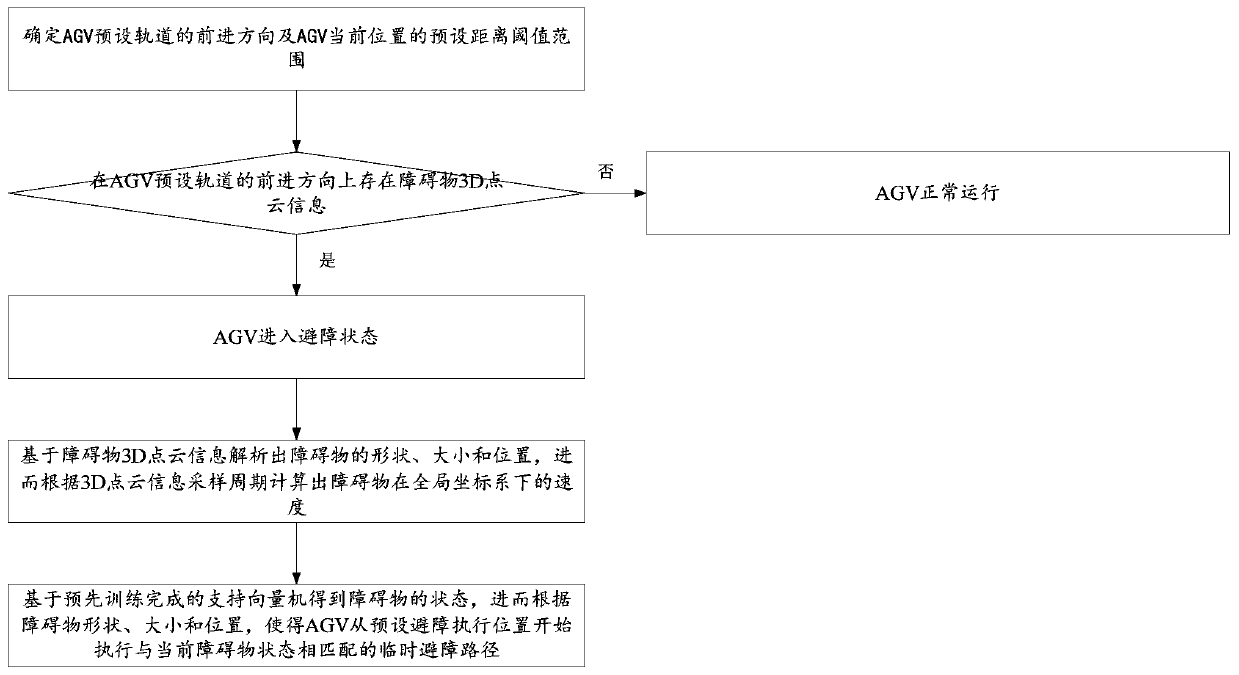
[0032] Such as figure 1 As shown, the present embodiment provides a 3D vision-based AGV space obstacle avoidance method, which includes:
[0033] Step 1: Within the preset distance threshold range of the AGV's current position, judge whether there is 3D point cloud information of obstacles in the direction of the AGV's preset trajectory. If not, the AGV operates normally; otherwise, the AGV enters the obstacle avoidance state.
[0034] In a specific implementation, the current position and heading direction of the AGV are obtained according to the real-time received AGV pose information. Among them, the AGV pose information includes the real-time position and speed of the AGV.
[0035] For example: at time t, the AGV pose information includes the position p and velocity v of the AGV. Among them, the position p and velocity v of the AGV are both vectors, and they are in the same global coordinate system.
[0036] In this embodiment, within the preset distance threshold range...
Embodiment 2
[0061] This embodiment provides a 3D vision-based AGV space obstacle avoidance system, which includes:
[0062] (1) Obstacle judging module, which is used to judge whether there is obstacle 3D point cloud information in the forward direction of the AGV preset track within the preset distance threshold range of the current position of the AGV, if not, the AGV operates normally; Otherwise, the AGV enters the obstacle avoidance state.
[0063] In a specific implementation, the current position and heading direction of the AGV are obtained according to the real-time received AGV pose information. Among them, the AGV pose information includes the real-time position and speed of the AGV. For example: at time t, the AGV pose information includes the position p and velocity v of the AGV.
[0064] In this embodiment, within the preset distance threshold range of the AGV's current position, it is judged whether there is obstacle 3D point cloud information in the advancing direction of...
Embodiment 3
[0089] This embodiment provides a computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the steps in the 3D vision-based AGV space obstacle avoidance method described in Embodiment 1 are implemented.
[0090] In this embodiment, within the preset distance threshold range of the AGV's current position, it is judged whether there is obstacle 3D point cloud information in the forward direction of the AGV's preset track, which can narrow the obstacle detection range, reduce the amount of data calculation, and improve obstacle avoidance detection. real-time.
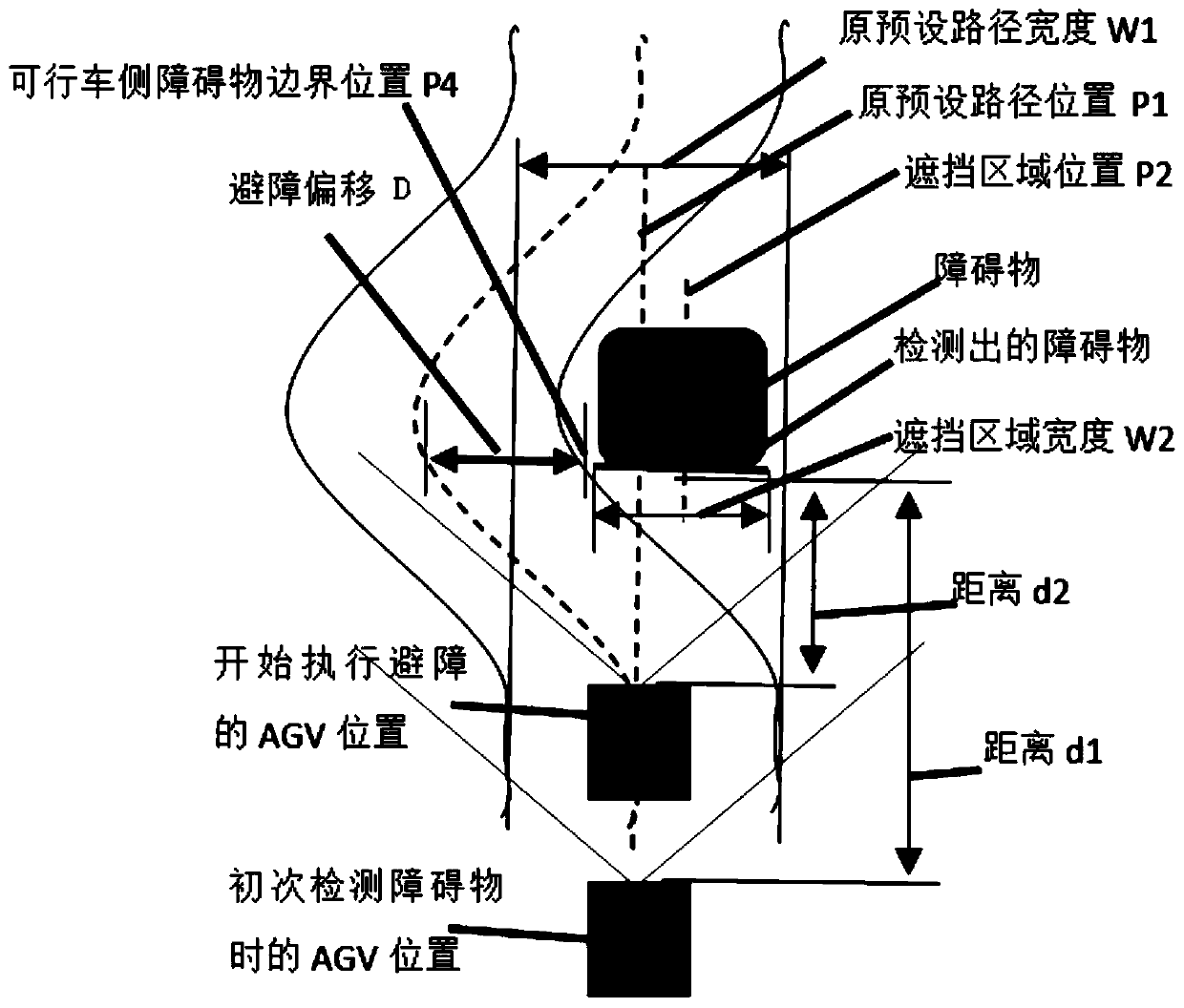
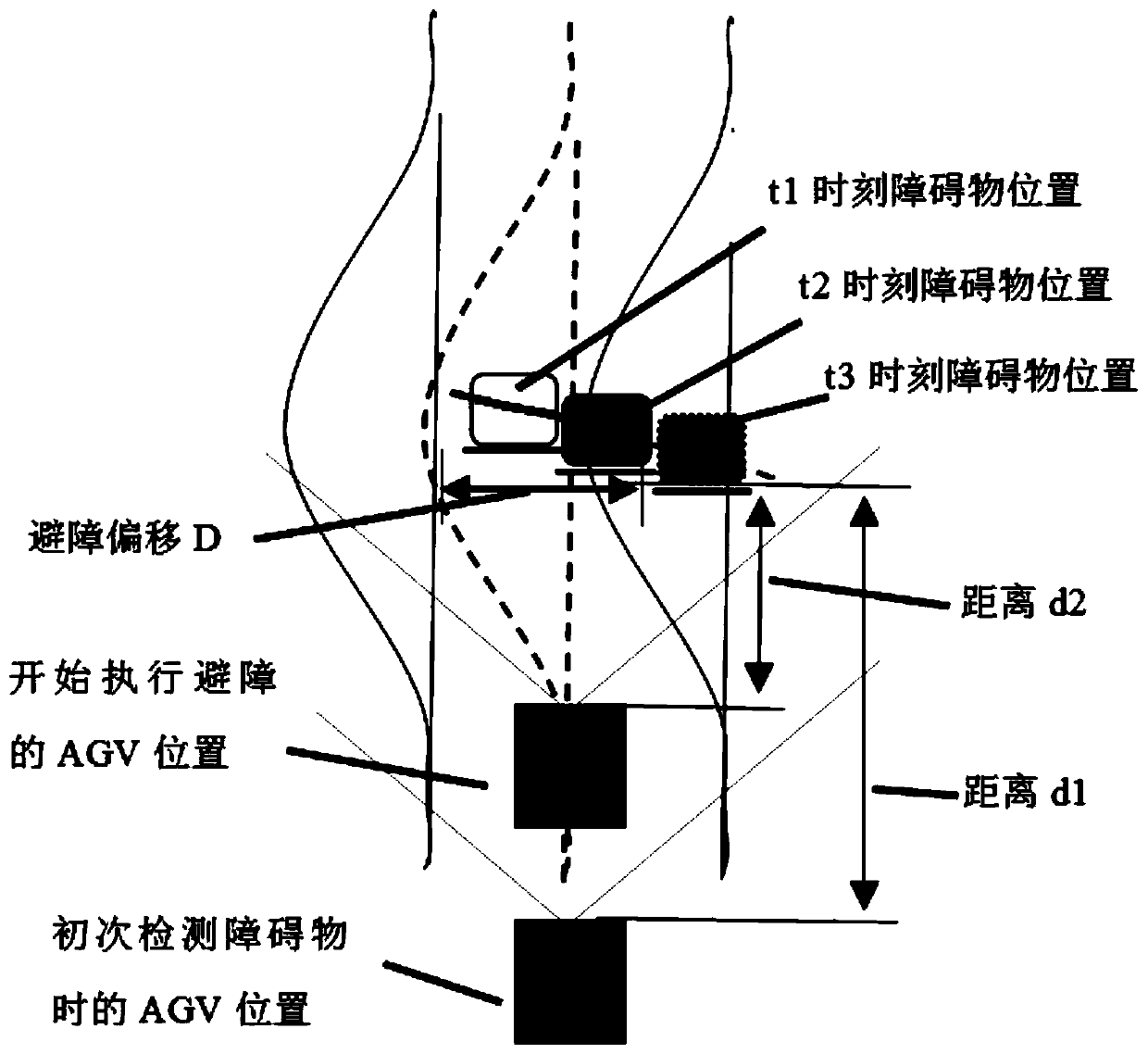
[0091] This embodiment analyzes the shape, size and position of each obstacle based on the 3D point cloud information of the obstacle, and then obtains the accurate information of the obstacle. In order to judge the state of the obstacle, an accurate data basis is improved, which is conducive to improving the AGV The accuracy of spatial obstacle avoidance.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More