

UUV path planning method based on particle swarm algorithm
A particle swarm algorithm and path planning technology, applied in navigation calculation tools, three-dimensional position/channel control, and independent decision-making process, can solve problems such as falling into traps, premature convergence, and affecting the efficiency and quality of UUV underwater operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0059] In order to solve the problem of premature convergence and trapping in PSO in the local optimal problem due to the existence of adjustable parameters such as population size, inertia weight and acceleration coefficient, and even lack of population diversity, resulting in non-optimal planning path, and then For issues that affect the efficiency and quality of UUV underwater operations, this embodiment provides a UUV path planning method based on particle swarm optimization, including the following steps:
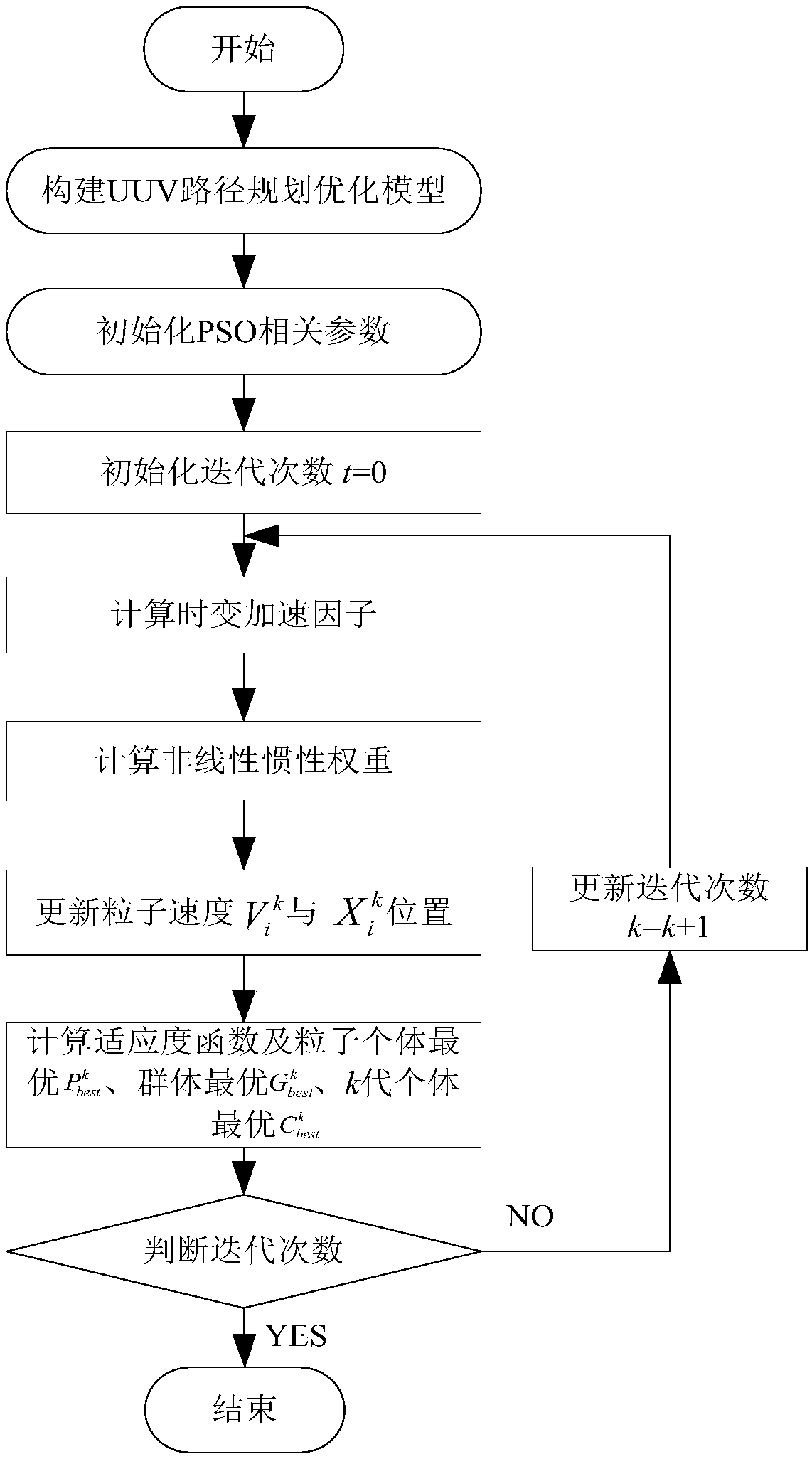
[0060] Step 1: According to the path length f 1 , the repulsive potential field between the UUV and the obstacle and the attractive potential field f between the UUV and the target 3 Build UUV path planning optimization model f;
[0061] Step 2: Initialize PSO related parameters;
[0062] Step 3: Calculate the time-varying acceleration factor c through the relevant parameters 1 、c 2 and c 3 ;
[0063] Step 4: Calculate the nonlinear inertia weight w;
[0064] St...
Embodiment 2
[0112] In order to verify the feasibility and effectiveness of the UUV path planning method based on the particle swarm algorithm proposed in Embodiment 1, this embodiment uses a specific numerical simulation experiment to verify:
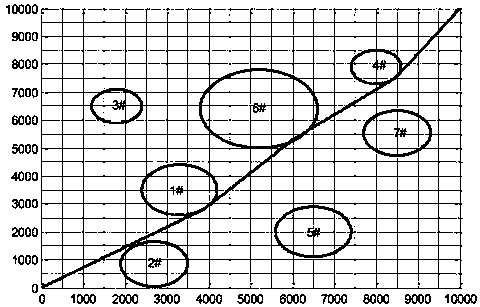
[0113] Specifically, it is assumed that the path planning model is established as follows: Suppose the UUV avoids 7 static obstacles (1#, 2#, 3#, 4#, 5#, 6#, 7#) and the UUV navigates from the starting point (0,0) Cross over to the target point (10000, 10000), represented by circles with different radii, the UUV’s motion speed is 5 knots (2.5 meters), and the initial heading angle is θ=45°; the static obstacle position information is shown in Table 1:
[0114] Table 1. Obstacle position information and radius
[0115] obstacle Location radius obstacle Location radius 1# (3265,3509) 900 5# (6508,2030) 900 2# (2600,917) 600 6# (5250,6500) 1300 3# (1783,7450) 1200 7# (8502,5000) 800 4# (8034,7560) 6...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More