

AI-based automatic weld path identification method
A path recognition and automatic technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of high manpower cost and time cost, inability to effectively guarantee welding quality, adjust welding parameters, etc., and achieve reduction The effect of design link, reducing programming and teaching process, and improving production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
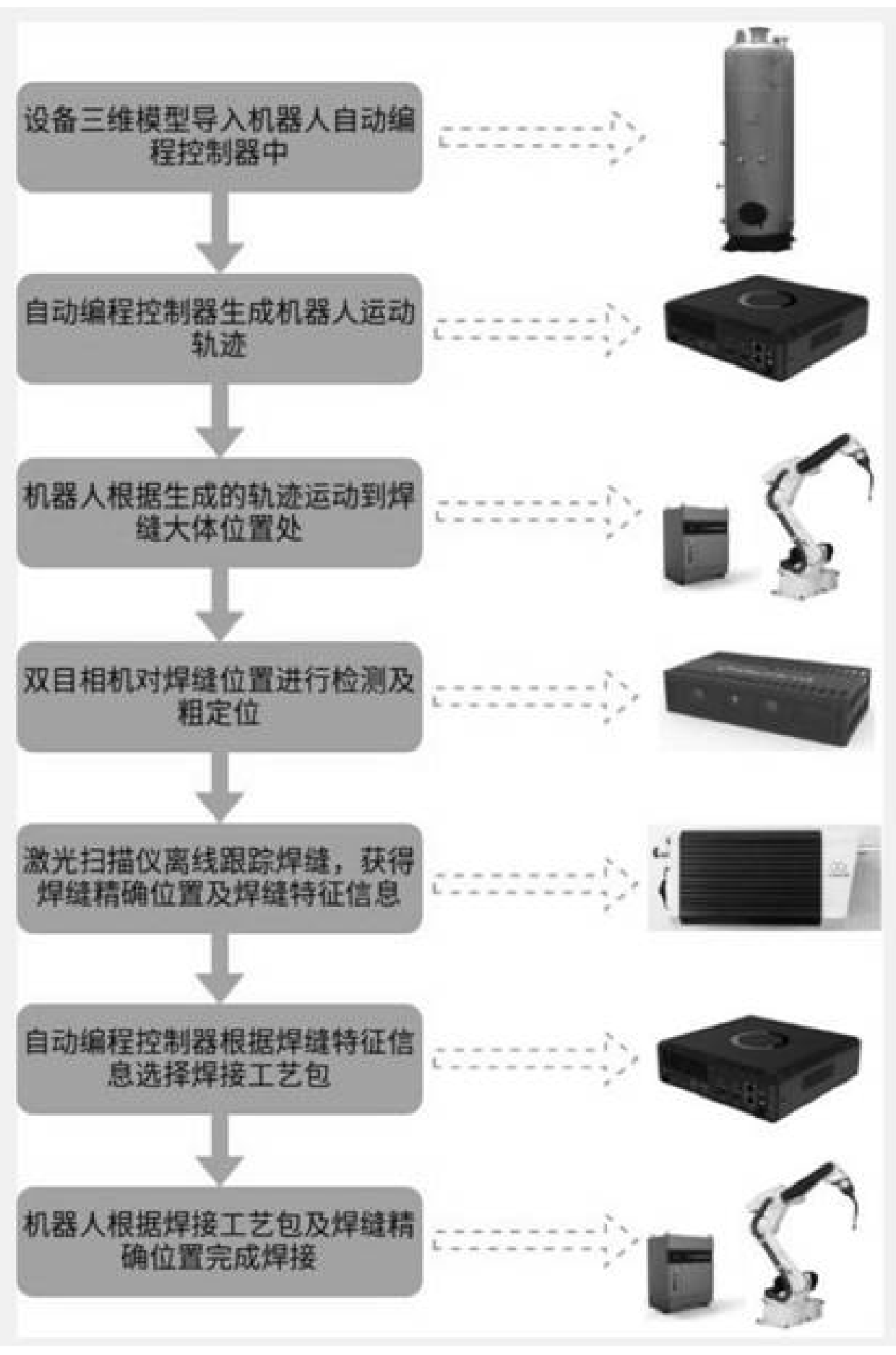
[0016] Concrete operation method when the present invention uses is:
[0017] 1. Import the 3D model data of the workpiece to be welded into the welding robot controller. The 3D model data of the imported workpiece includes the overall structure of the workpiece to be welded and the position information of the weld in the workpiece;
[0018] 2. Install the workpiece to be welded on the welding tooling table, and take an overall photo of the workpiece through the stereo camera fixed above the table to detect whether the position and posture of the welding workpiece on the table are correct, which requires on-site manual confirmation All equipment is securely in place.
[0019] 3. The automatic programming controller of the welding robot generates offline the movement trajectory of the welding robot to complete the entire welding process of the workpiece according to the three-dimensional model data of the equipment, the welding seam position information and the model of the wel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More