Robot anti-collision device and method and robot
An anti-collision device and robot technology, applied in the field of robots, can solve problems such as complex realization process, and achieve the effect of simple and feasible cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
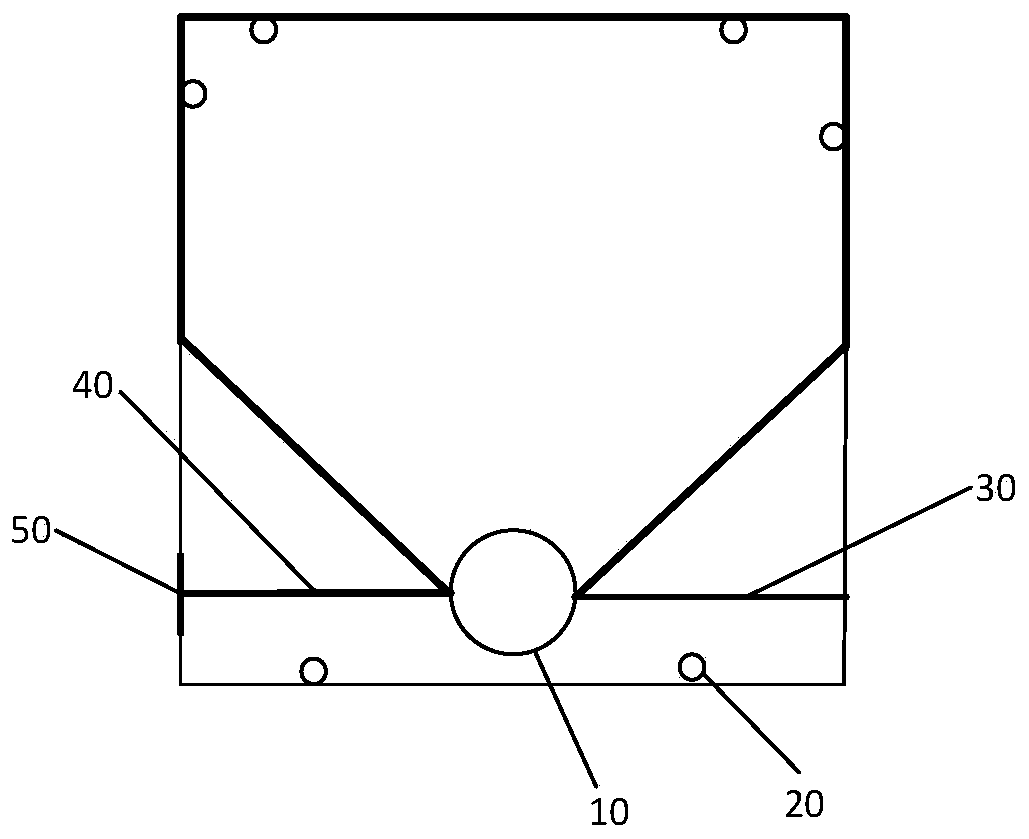
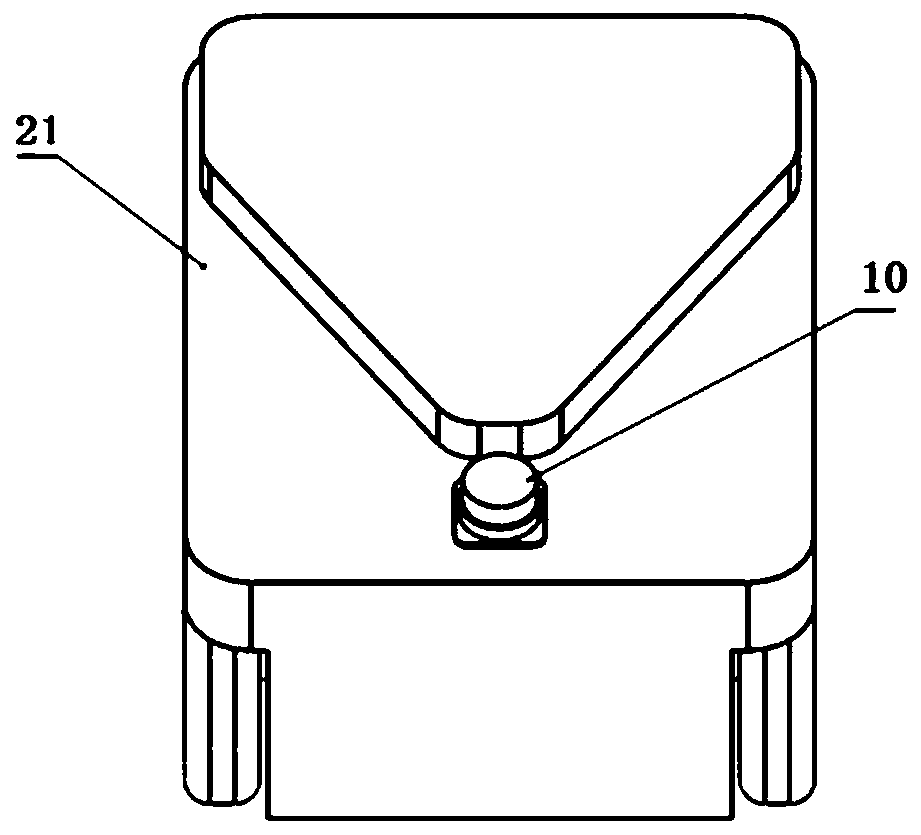
[0036] figure 1 It is a top view schematic diagram of a robot anti-collision device provided in Embodiment 1 of the present invention, and the robot anti-collision device is suitable for the situation where multiple robots are moving and avoiding obstacles. The robot includes a robot body, and the device includes: a laser radar 10, an ultrasonic detector 20, a navigation control module (not shown in the figure), and radar auxiliary components (30, 40 and 50) arranged on the robot body .
[0037] Wherein, the laser radar 10 is used to detect point cloud data between the robot bodies of other robots and the radar auxiliary components (30, 40 and 50) in the anti-collision devices of other robots;
[0038] The ultrasonic detector 20 is used to detect ultrasonic data between robot bodies of other robots;
[0039] The navigation control module is used to determine the actual detection position information according to the point cloud data and the ultrasonic data, and perform colli...
Embodiment 2
[0068] Figure 7 It is a flow chart of a robot collision avoidance method provided by Embodiment 2 of the present invention. This method is suitable for the situation of obstacle avoidance during the movement of multiple robots, and this method is executed by the navigation control module in the robot anti-collision device, see Figure 7 , the method specifically includes:
[0069] S710. Obtain point cloud data detected by the lidar between the robot body of the other robot and the radar auxiliary components in the anti-collision device of the other robot.
[0070] Among them, the laser radar is used to collect the obstacle information encountered by the robot during its travel, and the distance and position information of the obstacle can be determined according to the collected three-dimensional point cloud data.
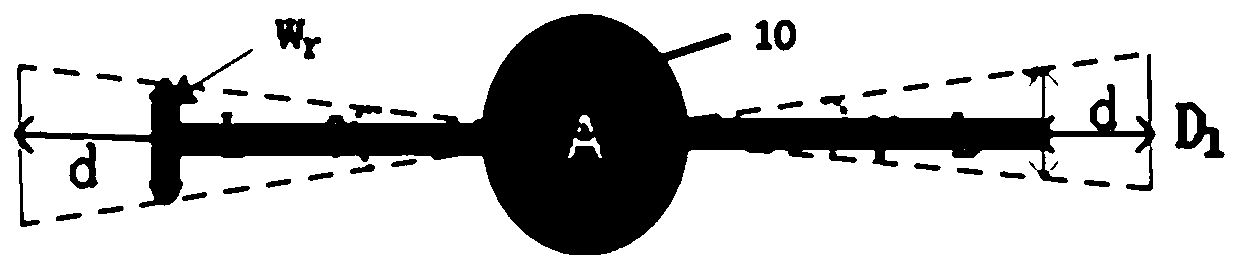
[0071] In this embodiment, the setting of the radar auxiliary component will cause a certain occlusion of the emission point angle of the laser radar, so the la...
Embodiment 3
[0087] Figure 8 A robot 800 provided in the third embodiment of the present invention includes a robot body 81, and the robot body also includes a robot anti-collision device 82 as described in the first embodiment above, which is arranged on the robot body.
[0088] The robot 800 realizes the accurate detection of the actual distance between the robots by setting the radar auxiliary components on the robot body, solves the inherent defects of laser SLAM, and avoids the use of a scheduling system to prevent two vehicles from colliding or other detection of the position of the accessory robot. The redundancy of the system and the added cost brought by the sensor equipment are simple and convenient to implement.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com