Multipoint pre-aiming LQR transverse control method based on Fiala brush tire model
A tire model, lateral control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as deviation from the desired path and vehicle instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
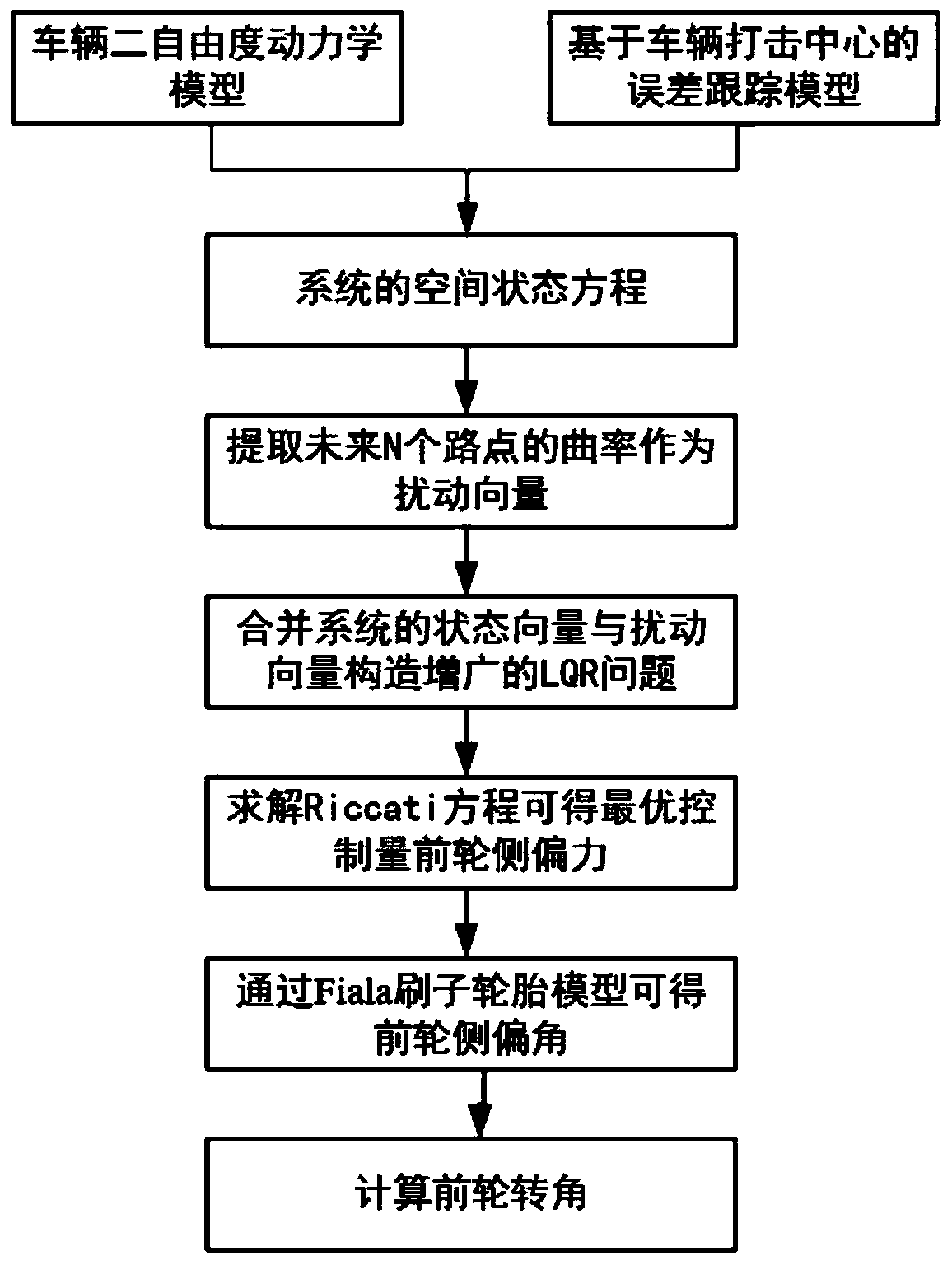
[0075] As an improved specific implementation, the vehicle two-degree-of-freedom dynamics model in the step 1 is:
[0076]
[0077]
[0078] In the formula, F f is the cornering force of the front wheel, F r is the rear wheel cornering force, m is the mass of the vehicle, U y and U x are the lateral velocity and longitudinal velocity, r is the yaw rate of the vehicle, a and b are the distances between the front axle, the rear axle and the center of mass of the vehicle, respectively, I z is the steering moment of inertia of the vehicle. Through the above method, the two-degree-of-freedom dynamic model of the vehicle can be effectively constructed, and the model is related to each basic parameter data of the vehicle, so that the model can accurately reflect the specific situation of the vehicle. .
[0079] As an improved specific implementation, the tracking error model based on the vehicle strike center in the step 1 is:
[0080]
[0081]
[0082]
[0083] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More