

Robot control method based on contour recognition, storage medium and mobile robot
A technology of mobile robot and control method, which is applied in the field of computer vision, and can solve problems such as affecting normal work and poor obstacle avoidance performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
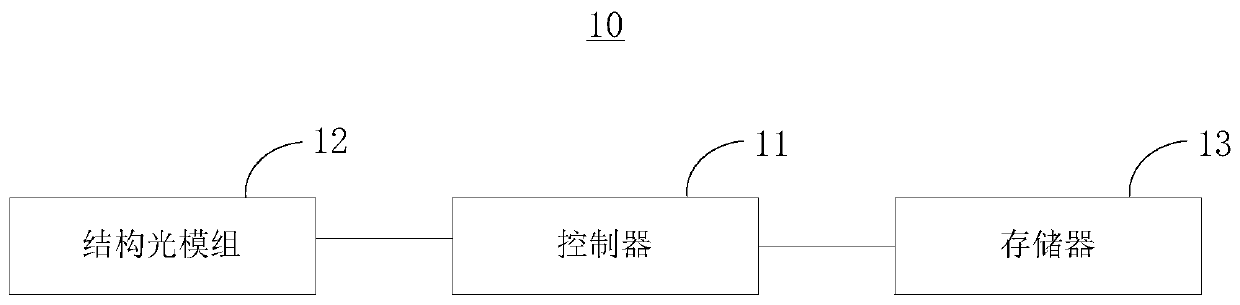
[0042] Please refer to figure 1 and figure 2 , this embodiment provides a robot control method based on contour recognition, which is applied to the controller 11 of the mobile robot 10 , and in this embodiment, the mobile robot 10 further includes a structured light module 12 .
[0043] When the method is applied to the controller 11 of the mobile robot 10, step S110-step S140 are executed.
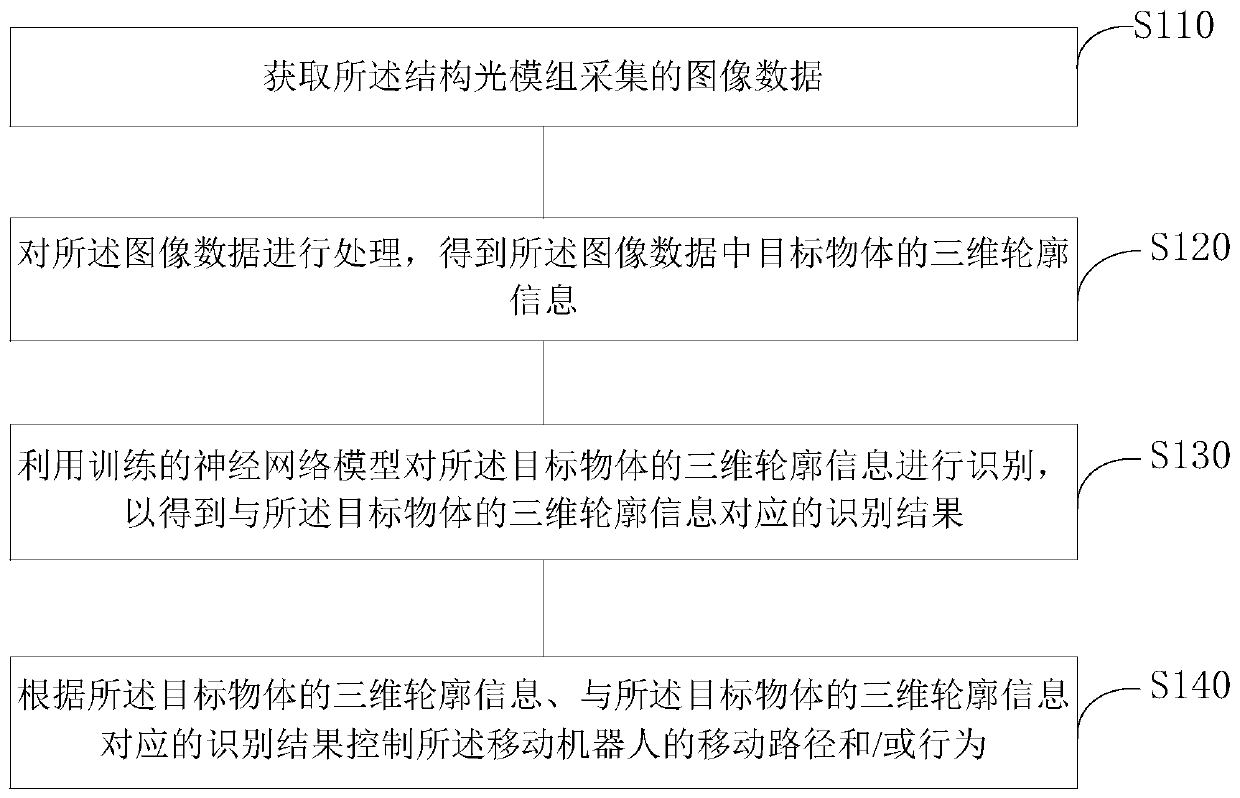
[0044] Step S110: Obtain image data collected by the structured light module 12 .
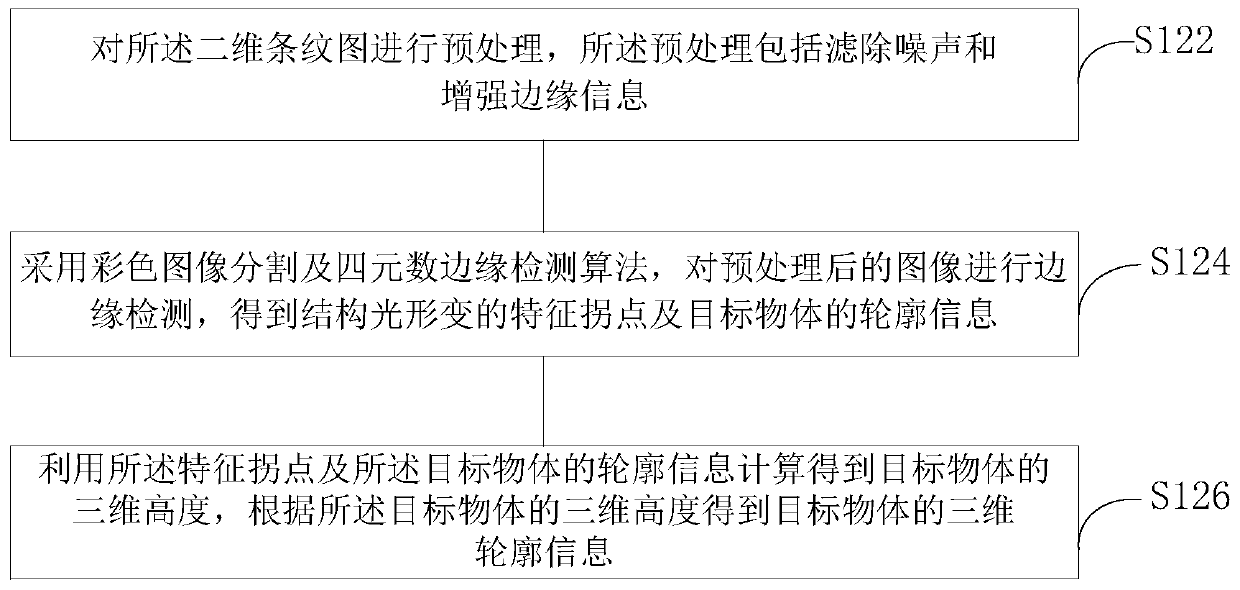
[0045] Step S120: Process the image data to obtain three-dimensional contour information of the target object in the image data.
[0046] Step S130: Using the trained neural network model to recognize the three-dimensional contour information of the target object, so as to obtain a recognition result corresponding to the three-dimensional contour information of the target object.
[0047] Step S140: Control the moving path and / or behavior of the mobile robot 10 according to the three-dimensional conto...
Embodiment 2
[0089] This embodiment also provides a storage medium, such as a flash memory, a hard disk, a multimedia card, a card-type memory (for example, SD or DX memory, etc.), random access memory (RAM), static random access memory (SRAM), read-only memory ( ROM), Electrically Erasable Programmable Read-Only Memory (EEPROM), Programmable Read-Only Memory (PROM), magnetic memory, magnetic disk, optical disk, server, App application store, etc., on which computer programs are stored, and the computer When the program is executed by one or more processors, the robot control method based on contour recognition in Embodiment 1 can be realized.
[0090] For the specific implementation process of the steps of the above method, refer to Embodiment 1, and this embodiment will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More