

Anthropomorphic expression robot based on electroactive polymer driver
An electroactive polymer and driver technology, applied in the field of anthropomorphic robots, can solve problems such as large sense of motion faults, high energy consumption, difficult control and maintenance, etc., and achieve natural and vivid movements, low energy consumption, and improved affinity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The specific embodiment of the specific solution of the present invention will be further elaborated in conjunction with the accompanying drawings.
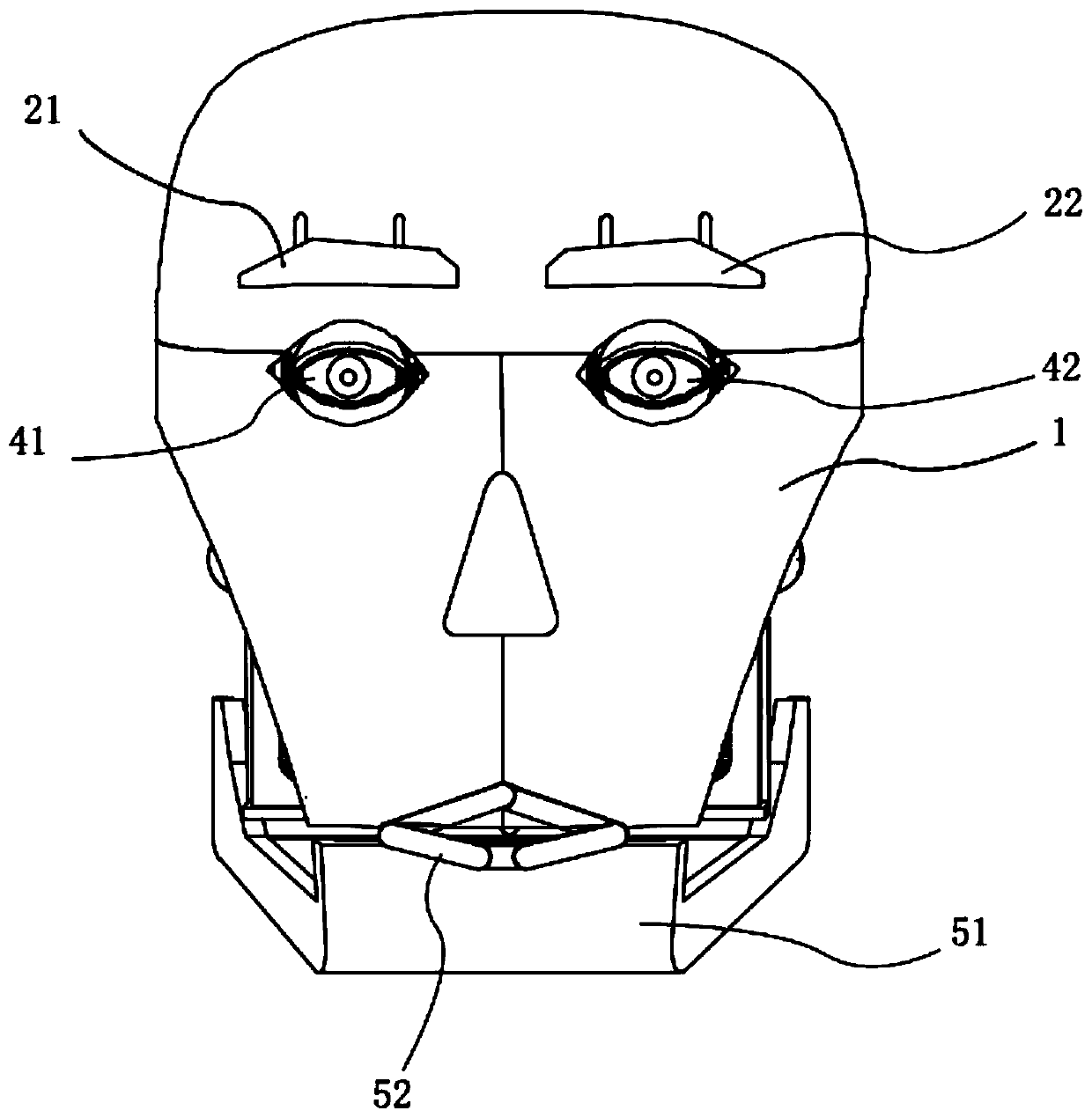
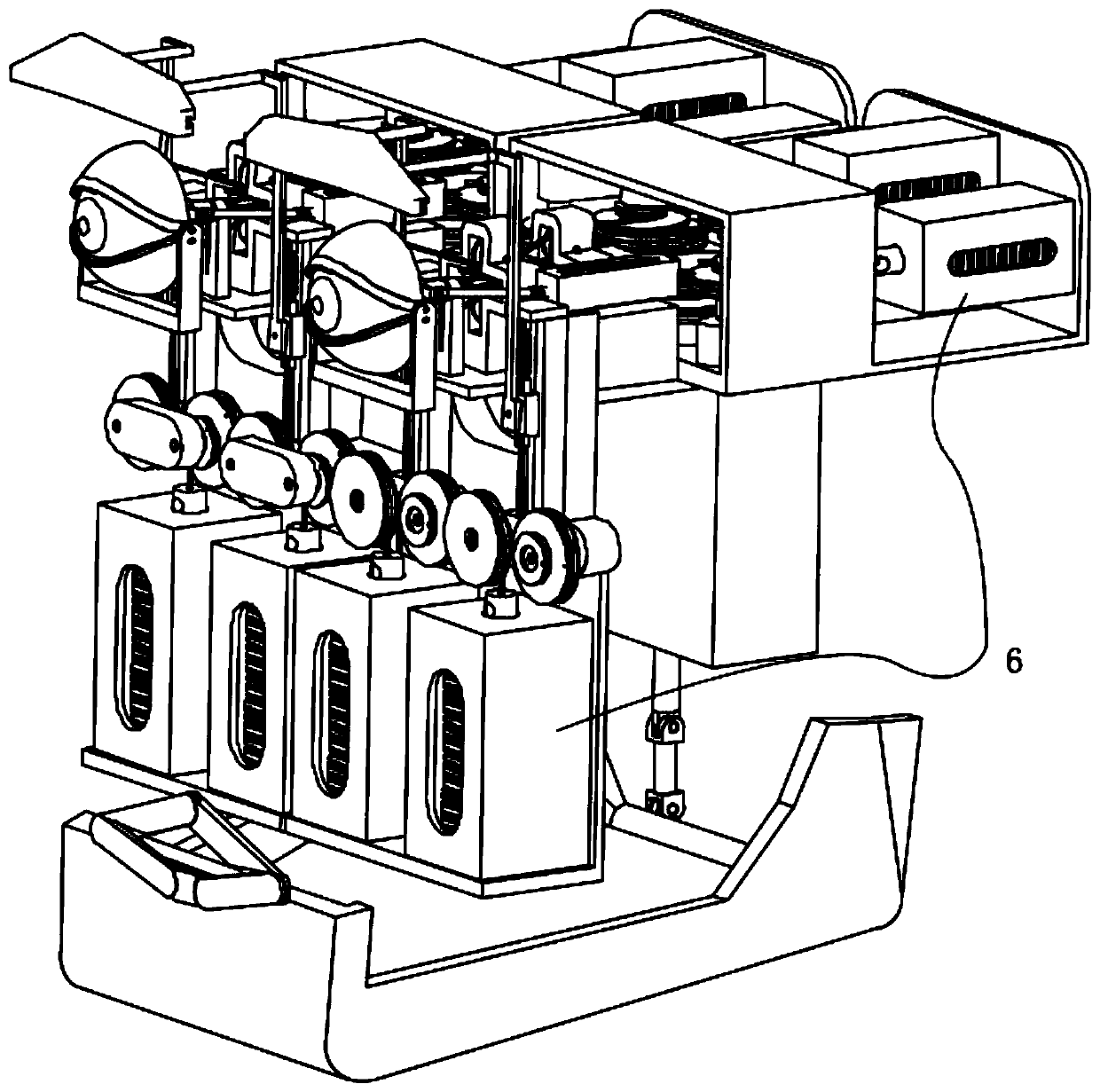
[0041] Such as figure 1 , 2 As shown, a humanoid facial expression robot based on an electroactive polymer driver 6 includes a head-shaped robot composed of a skull cover and a palate 1, an eyebrow 2, an eyelid 3, an eyeball 4, a lower jaw and a mouth 5. The eyebrow part 2 includes a left eyebrow 21 and a right eyebrow 24, and the left eyebrow 21 and the right eyebrow 24 have an independent eyebrow driving assembly respectively, and the eyebrow driving assembly drives the left eyebrow 21 or the right eyebrow 24 to move up and down and / or rotate left and right; The eyelid part 3 includes a left eyelid and a right eyelid, and the left eyelid and the right eyelid respectively have an independent eyelid driving assembly, and the eyelid driving assembly drives the left eyelid or the right eyelid to open and close up and down; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More