

Industrial robot pose measurement target device and joint position sensitive error calibration method
An industrial robot and pose measurement technology, which is applied in the direction of measuring devices, optical devices, instruments, etc., can solve the problems of high price of special targets and reduce the efficiency of pose measurement of industrial robots, so as to improve the global accuracy and realize automatic pose The effect of small measurement and calculation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] now combined with Figure 1-4 The present invention is described in further detail.
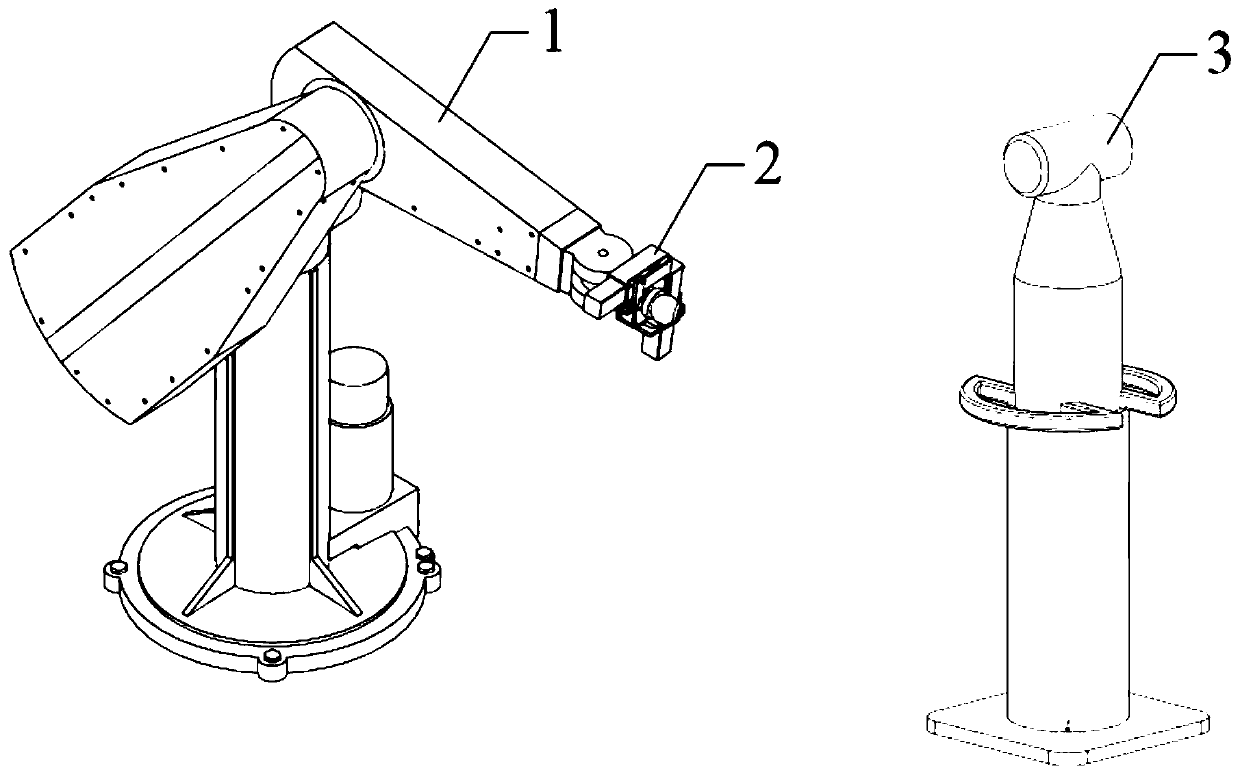
[0046] Such as figure 1As shown, in one embodiment of the present invention, an industrial robot 1 pose measurement target device includes a laser tracker 3 and a terminal pose measurement target device 2, and the terminal pose measurement target device 2 is located in an industrial At the end of the robot 1 , the laser tracker 3 is arranged on one side of the industrial robot 1 , and the laser tracker 3 is used to measure the spatial pose of the target ball 206 in the end pose measurement target device 2 .
[0047] In this embodiment, the end pose measurement target device 2 is installed on the flange of the industrial robot 1, that is, the end of the industrial robot 1, and the laser tracker 3 measures the spatial pose of the target ball 206 in the end pose measurement target device 2 .
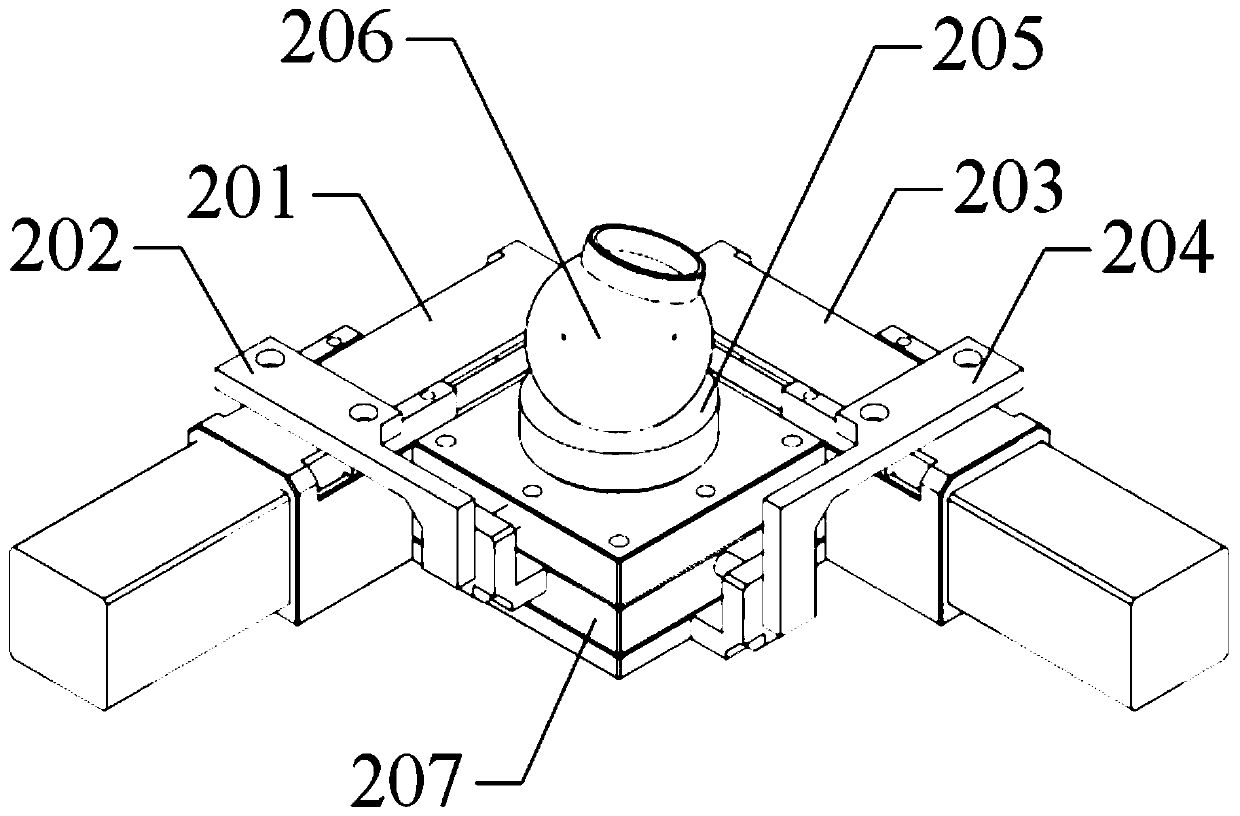
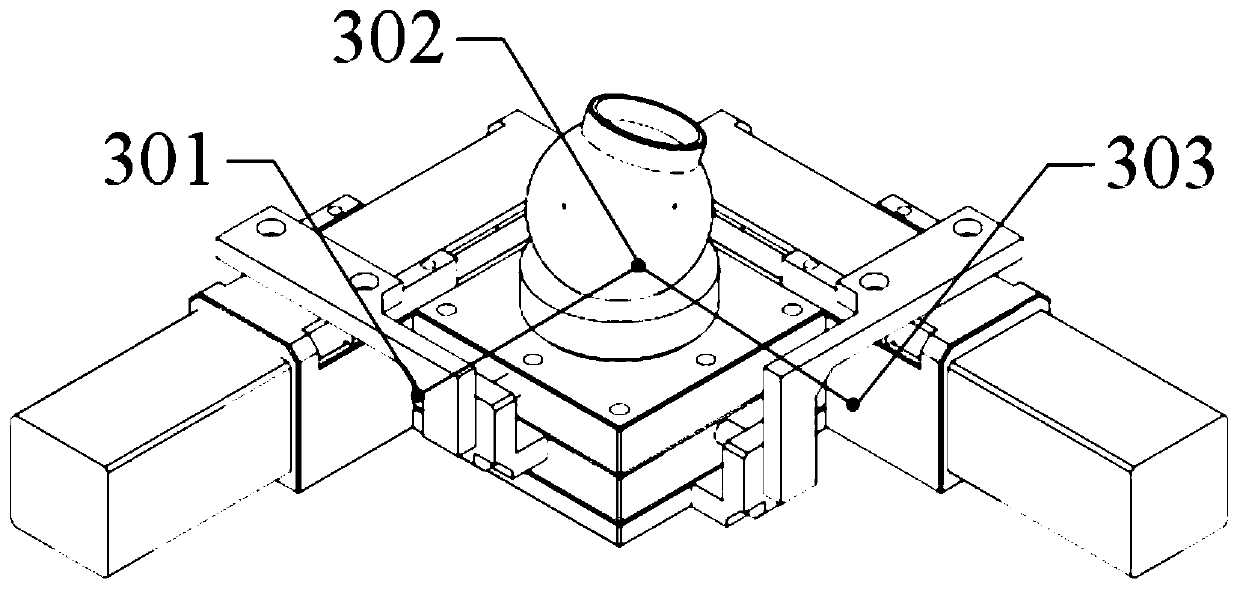
[0048] Such as figure 2 with image 3 As shown, in one of the embodiments of the present i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More