

Robot obstacle avoidance behavior learning method based on deep learning
A technology of deep learning and learning method, which is applied in the learning field of robot obstacle avoidance behavior, can solve the problems of large camera noise and poor use effect, and achieve the effects of reducing misjudgment, improving generalization ability, and improving inaccurate measurement depth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
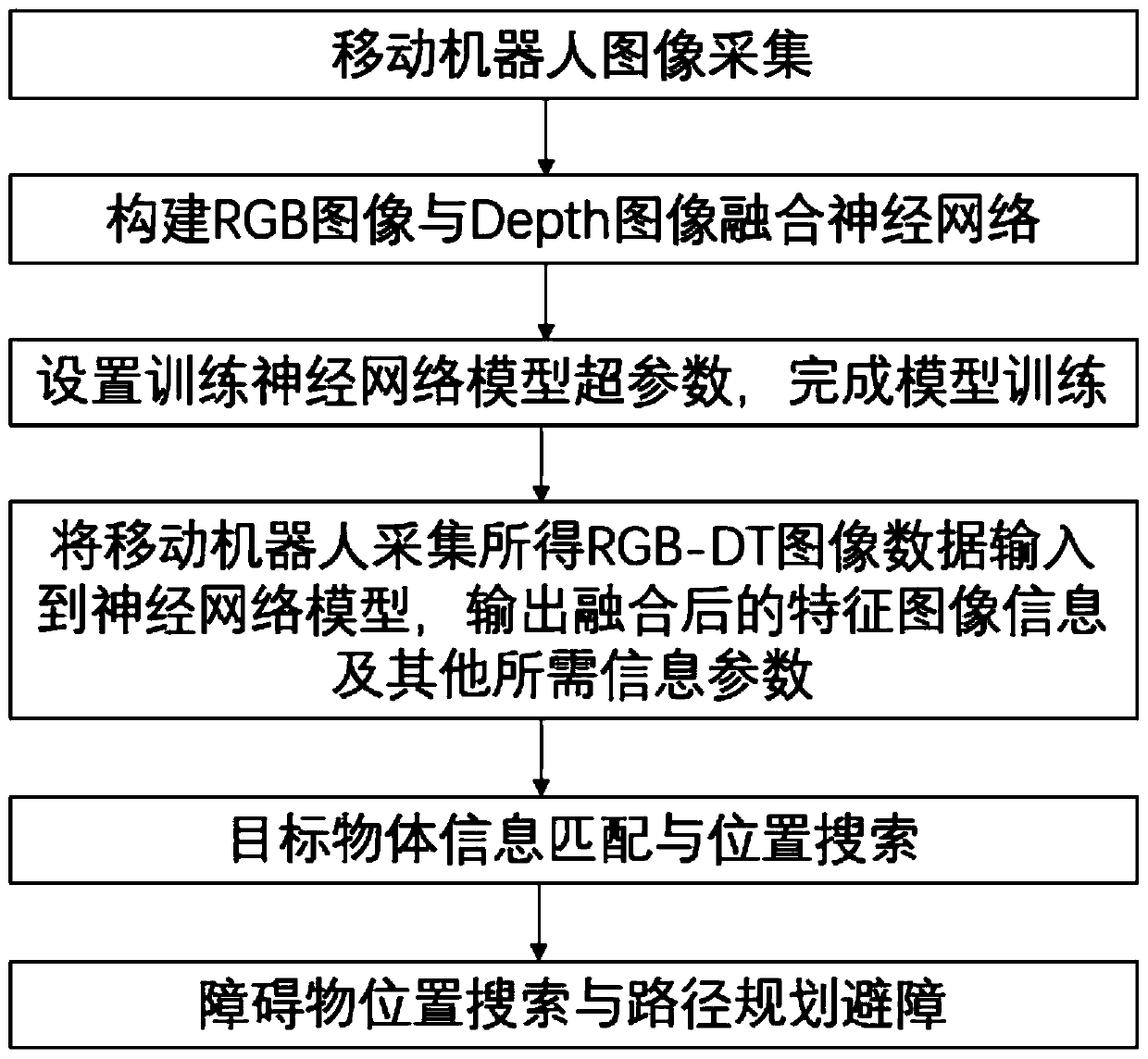
[0048] S1. Manipulate the robot to avoid obstacles in an unknown environment, collect RGB-D image data at a fixed frame rate through the Microsoft Kinect depth camera, and save them in time series;
[0049] S2, construct RGB image and Depth image fusion neural network model, input the collected RGB-D image data set into RGB image and Depth image fusion neural network model;
[0050] Specifically include:
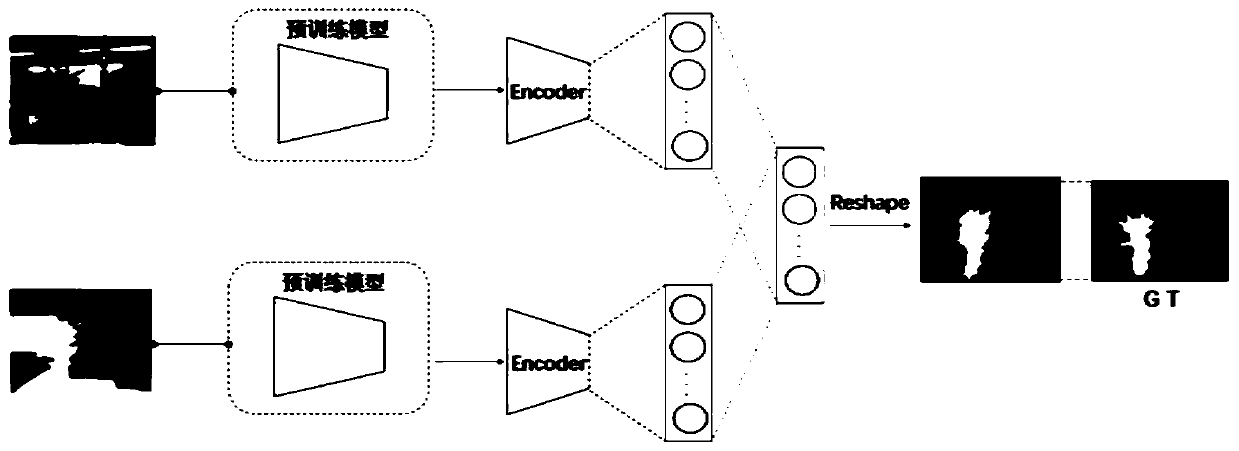
[0051] S21. Select the pre-training model of AlexNet as the feature extraction model of the input data: the input data is the NYUDepth Dataset V2 image data set, and the pre-training features are obtained after the feature extraction of the pre-training model;
[0052] S22 reduces the dimensionality of the pre-trained features through an encoder: the network of the encoder consists of two convolutional layers and a batch regularization layer BN;
[0053] S23. Vectorize the feature map obtained from dimensionality reduction, and use canonical correlation analysis to fuse fea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More