Method and system for determining navigation speed controller of high-speed unmanned surface vehicle based on multi-model switching
An unmanned boat and controller technology, applied in electric speed/acceleration control, general control system, control/regulation system and other directions, can solve problems such as poor control effect, and improve speed control accuracy and response speed quick effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
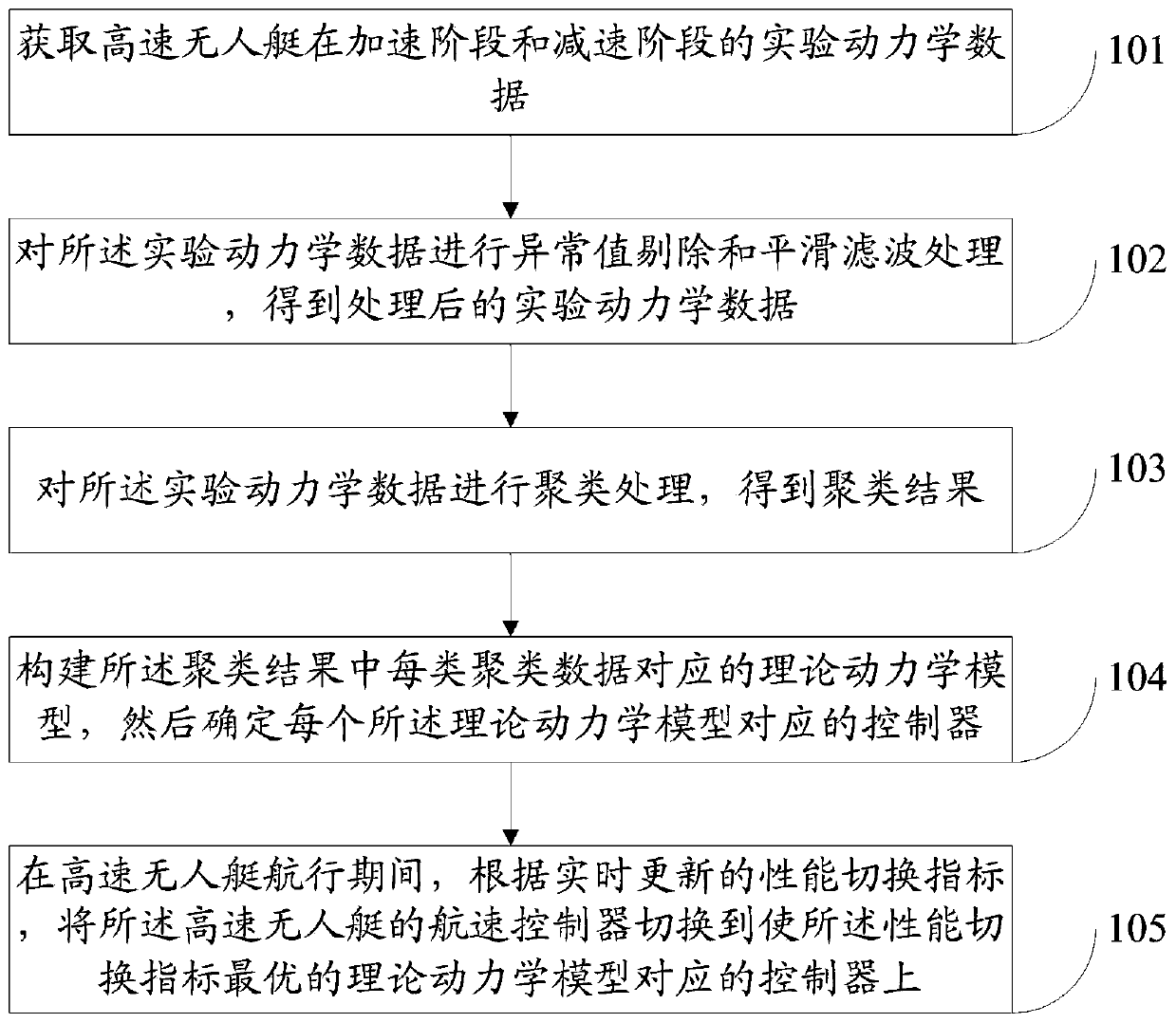
[0060] like figure 1 As shown, this embodiment provides a method for determining the speed controller of a high-speed unmanned boat based on multi-model switching, including the following steps.
[0061] Step 101: Obtain the experimental dynamics data of the high-speed unmanned boat in the acceleration phase and deceleration phase, the experimental dynamics data includes speed data and throttle data; specifically:
[0062] Determine the parameter identification experiment. Specifically: choose a weather with good sea conditions (sea conditions less than or equal to level 2), set up and test the communication antenna, and then use a crane to lower the high-speed unmanned boat into the seawater at a pier in a certain sea area. The communication mode of the high-speed unmanned boat is composed of the shore-based antenna and the high-speed unmanned boat antenna. A straight line and throttle control method are planned in the shore-based navigation control interface program.
[00...
Embodiment 2
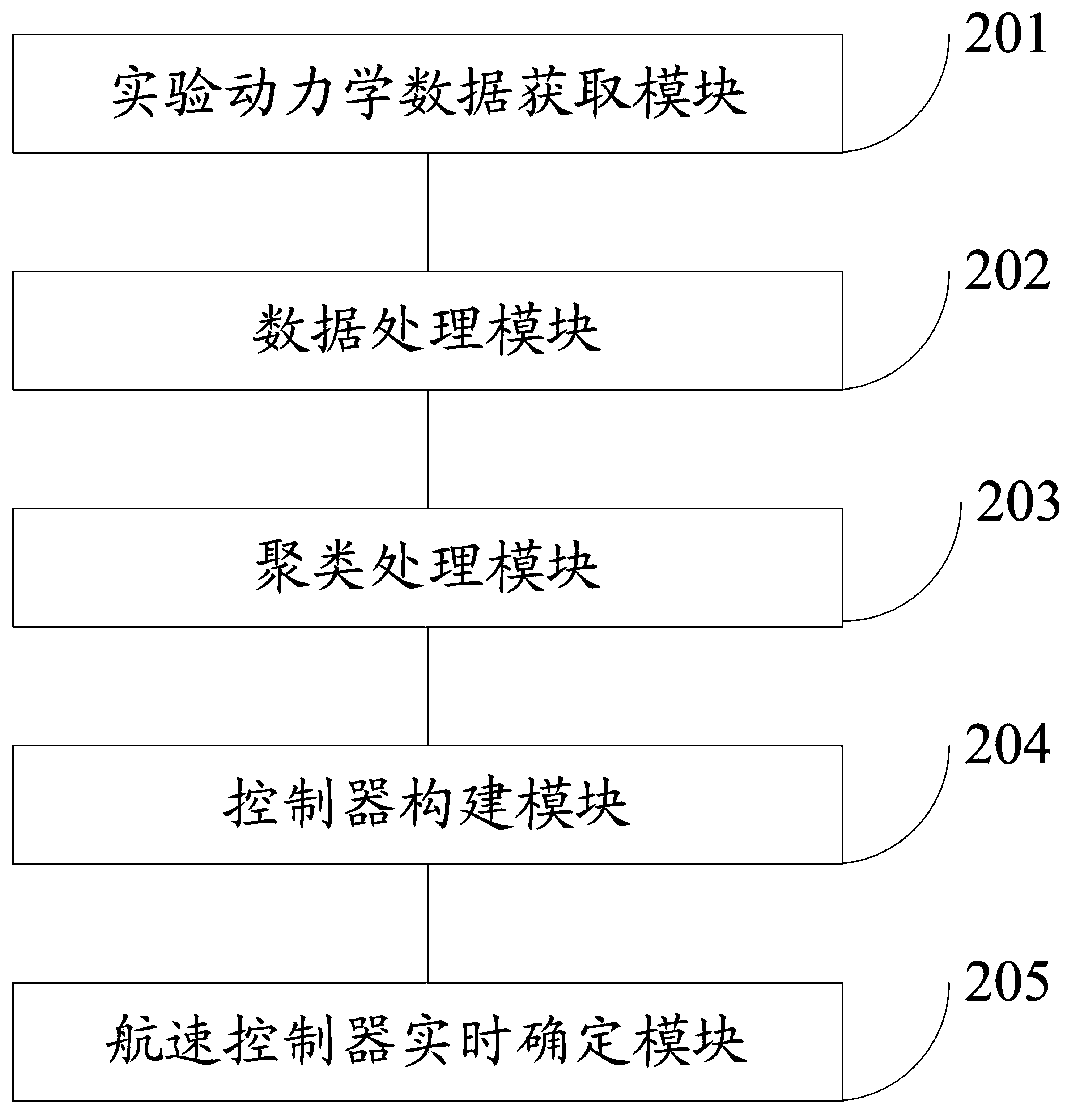
[0080] In order to achieve the above purpose, this embodiment provides a system for determining the speed controller of a high-speed unmanned boat based on multi-model switching, such as figure 2 shown, including:
[0081] The experimental dynamics data acquisition module 201 is used to acquire the experimental dynamics data of the high-speed unmanned boat in the acceleration phase and deceleration phase; the experimental dynamics data includes speed data and throttle data.
[0082] The data processing module 202 is configured to perform outlier elimination and smoothing filtering on the experimental kinetic data to obtain processed experimental kinetic data.
[0083] The clustering processing module 203 is configured to perform clustering processing on the experimental kinetic data to obtain a clustering result.
[0084] A controller construction module 204, configured to construct a theoretical kinetic model corresponding to each type of cluster data in the clustering resu...
Embodiment 3
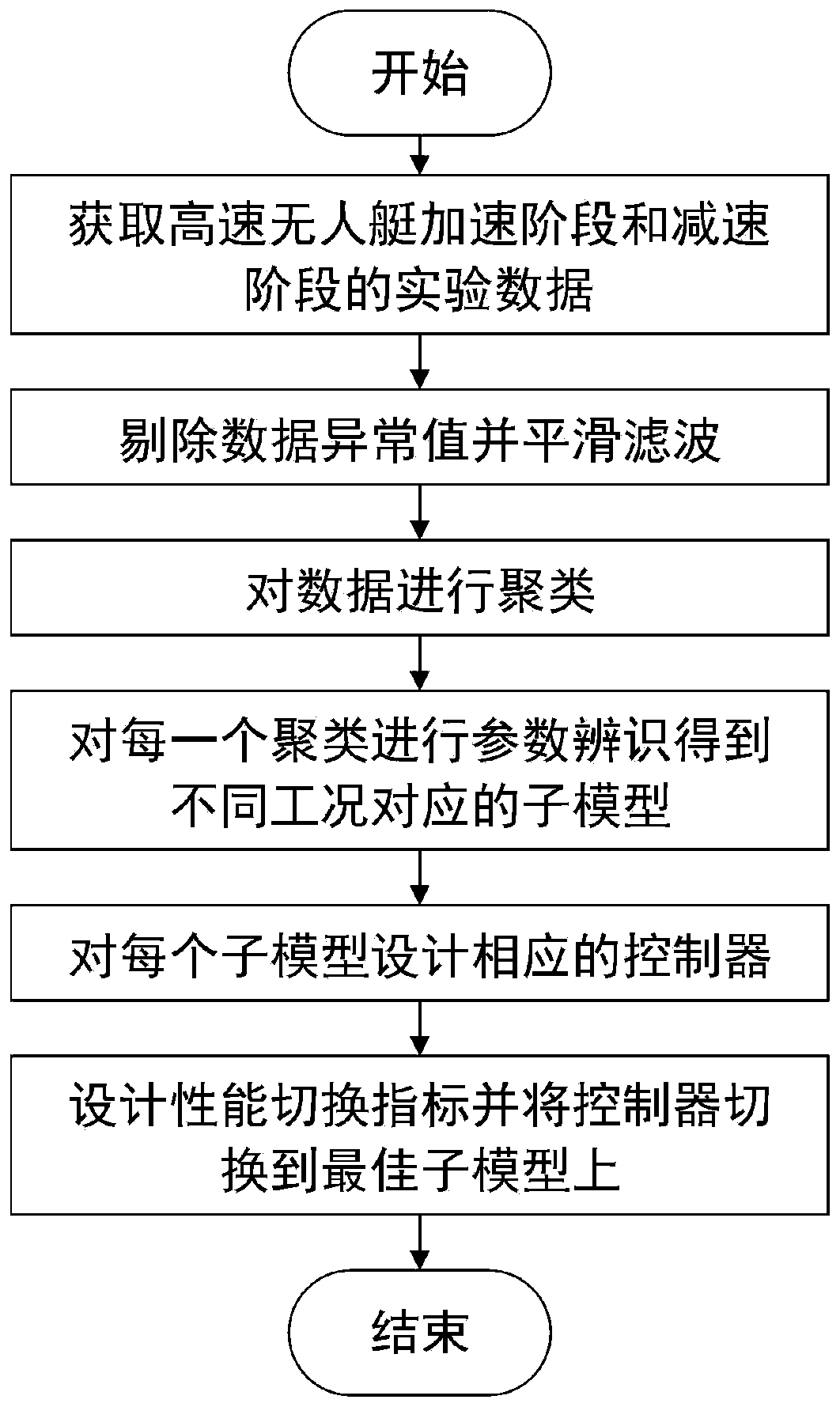
[0104] This embodiment provides a method for determining the speed controller of a high-speed unmanned boat based on multi-model switching, which mainly includes: (1) using a parameter identification experiment to obtain the dynamics of the high-speed unmanned boat under different operating domains during the acceleration and deceleration process (2) Carry out outlier elimination and smoothing filter processing on kinetic data; (3) Cluster these processed kinetic data and establish corresponding theoretical kinetic model for each cluster data; (4) Formulate the performance switching index. During the operation of the high-speed unmanned boat, the speed controller is switched to the controller corresponding to the theoretical dynamic model that makes the performance switching index optimal according to the performance switching index, so as to realize the high-speed unmanned ship based on multi-model switching. The design of the manned boat speed controller finally effectively i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com