

Industrial robot complete machine rigidity optimization method based on finite element technology
A technology of industrial robots and optimization methods, applied in design optimization/simulation, geometric CAD, CAD numerical modeling, etc., can solve problems such as low robot positioning accuracy, and achieve the effect of improving analysis efficiency, reducing development costs, and shortening development cycles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below.
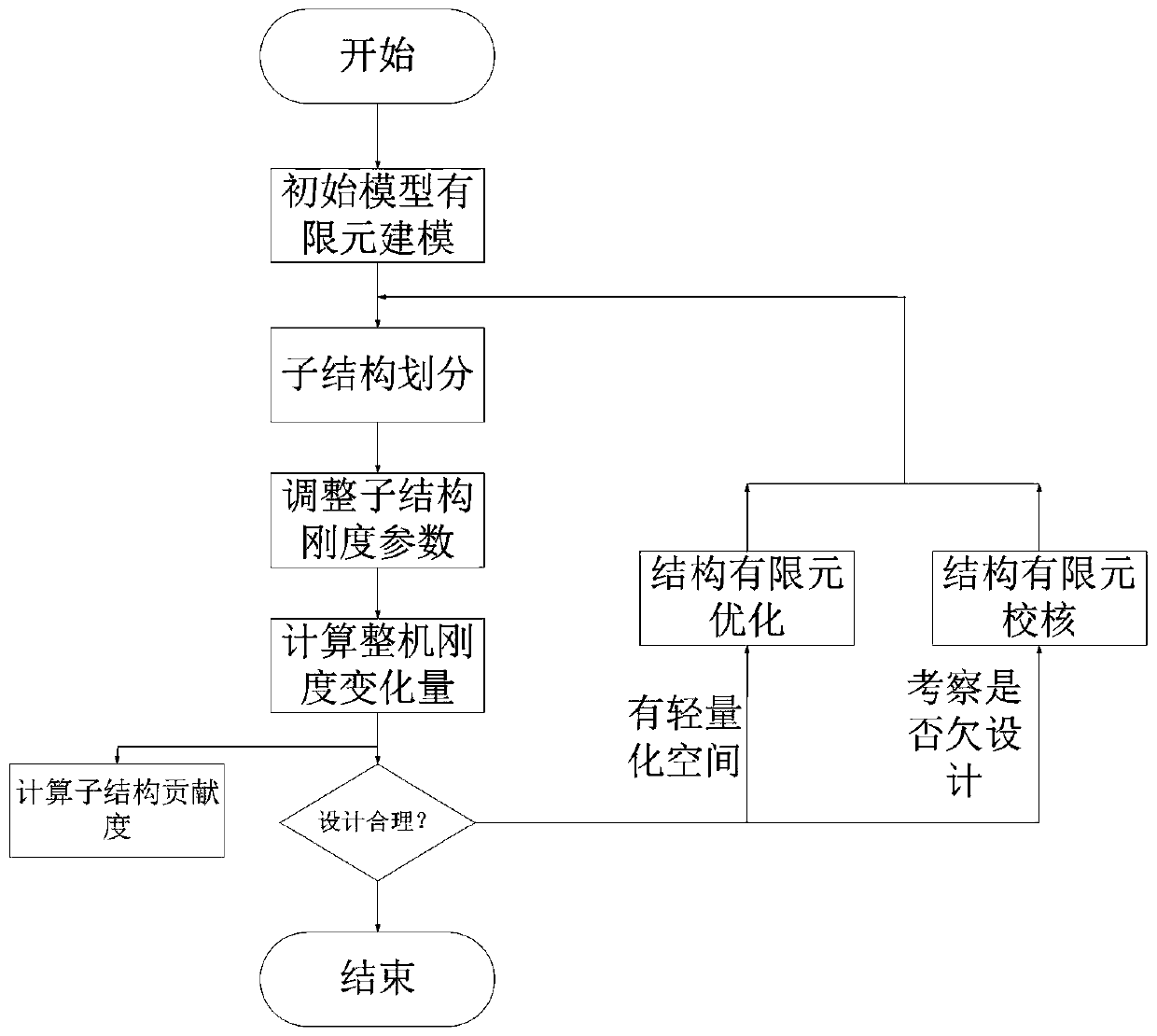
[0025] Such as Figure 1 to Figure 4 As shown, an industrial robot machine stiffness optimization method based on finite element technology, the specific steps are as follows:
[0026] S1: Finite element modeling of the initial model: establish the finite element model of the whole robot, and calculate the comprehensive stiffness K of the whole machine w and three-way stiffness K x 、K y 、K z ;
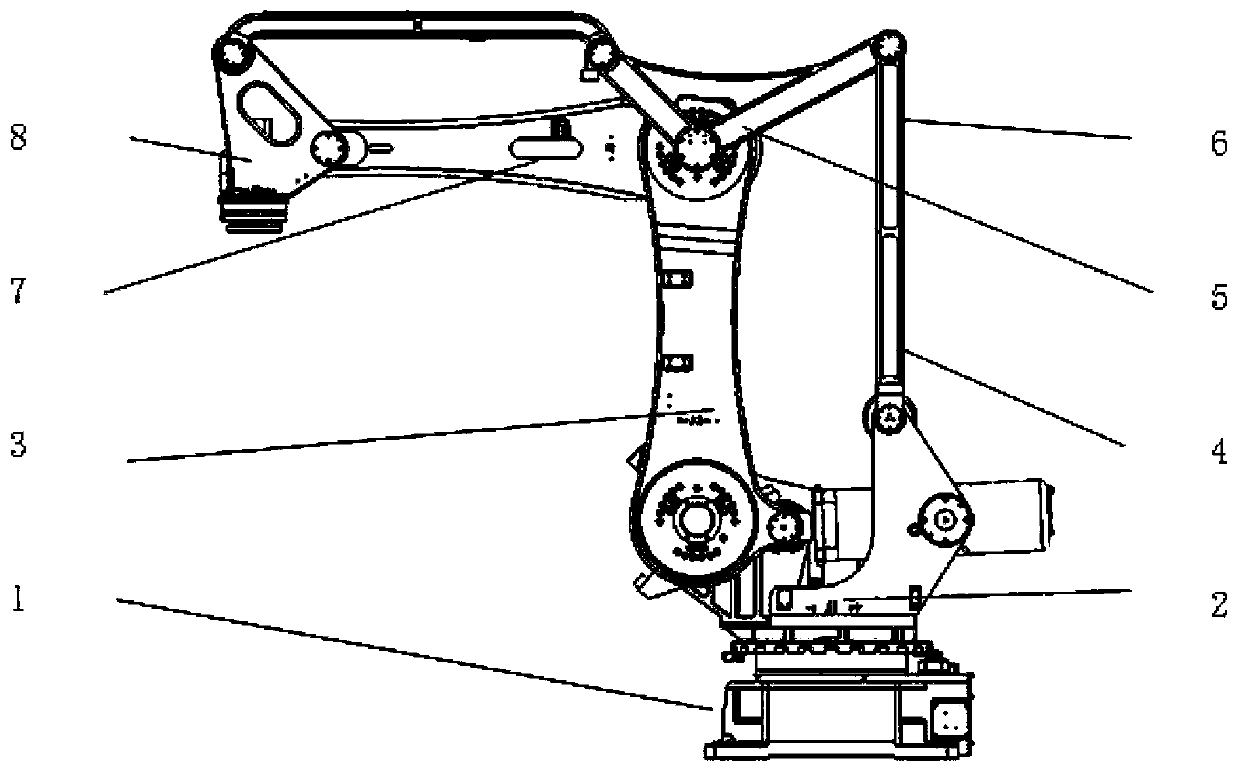
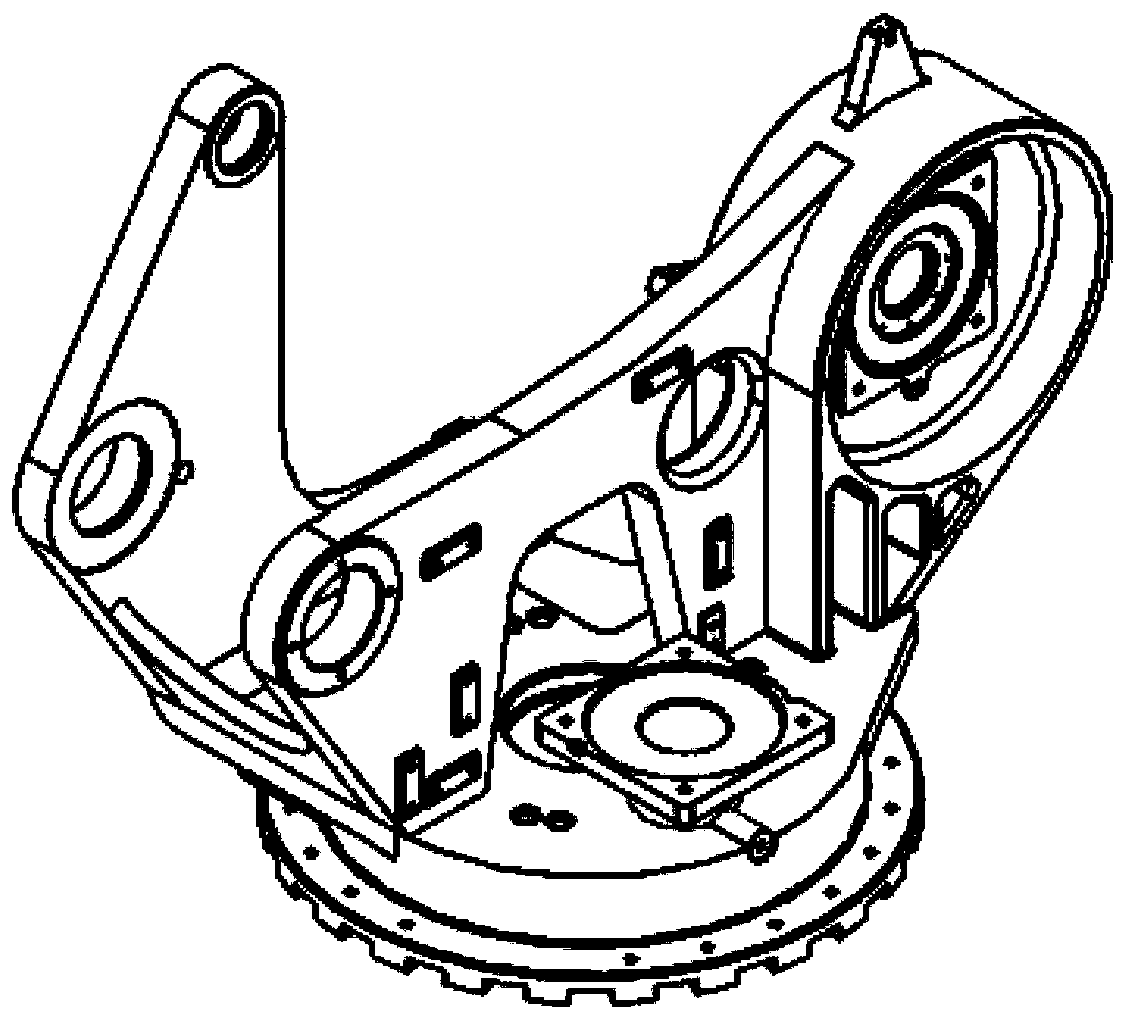
[0027] S2: Sub-structure division: Divide the robot into i sub-structures according to the rods and joints. Arm 7, wrist body 8;
[0028] S3: Adjust the stiffness parameters of the substructure: adjust the stiffness parameters of each substructure in the finite element model, load the three-direction component force at the end of the robot: Fx=200N, Fy=-500N and Fz=-200N, and calculate the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More