

A rigid-flexible humanoid five-fingered robotic gripper
A rigid-flexible, robotic gripper technology, applied in manipulators, manufacturing tools, chucks, etc., can solve the problems of poor positioning accuracy, complicated implementation process, unacceptable, etc., and achieve a firm grip effect, high acceptance, and weight reduction. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not conflict with each other.
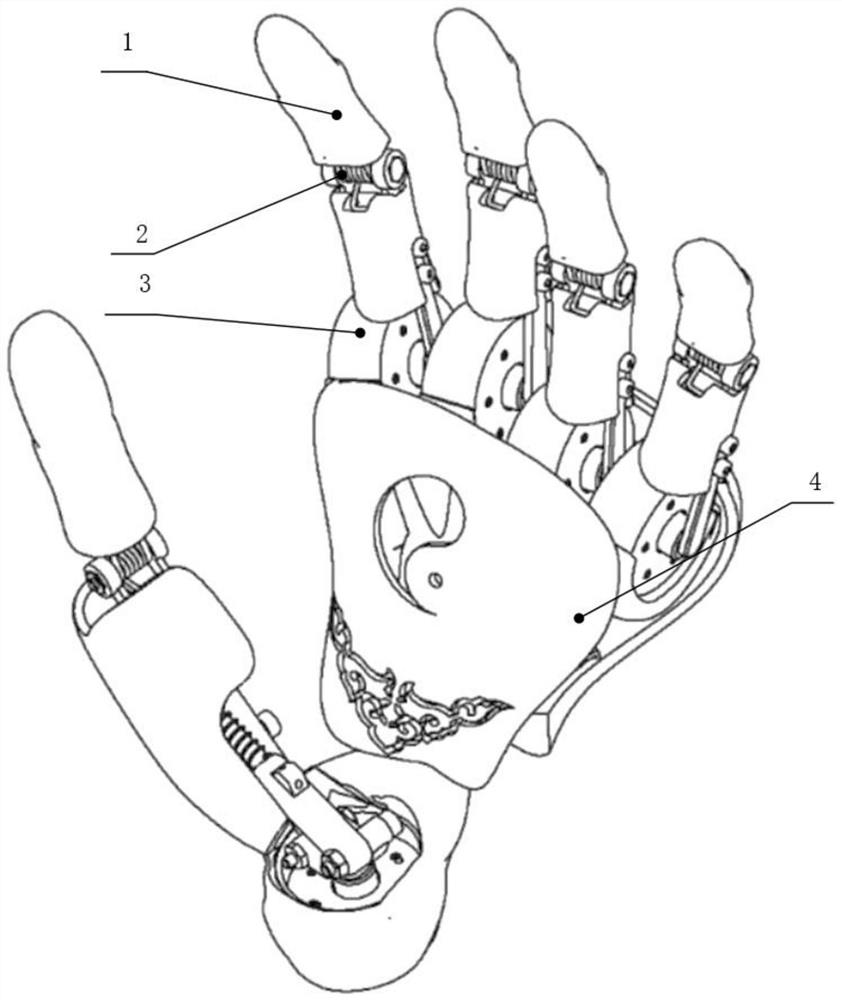
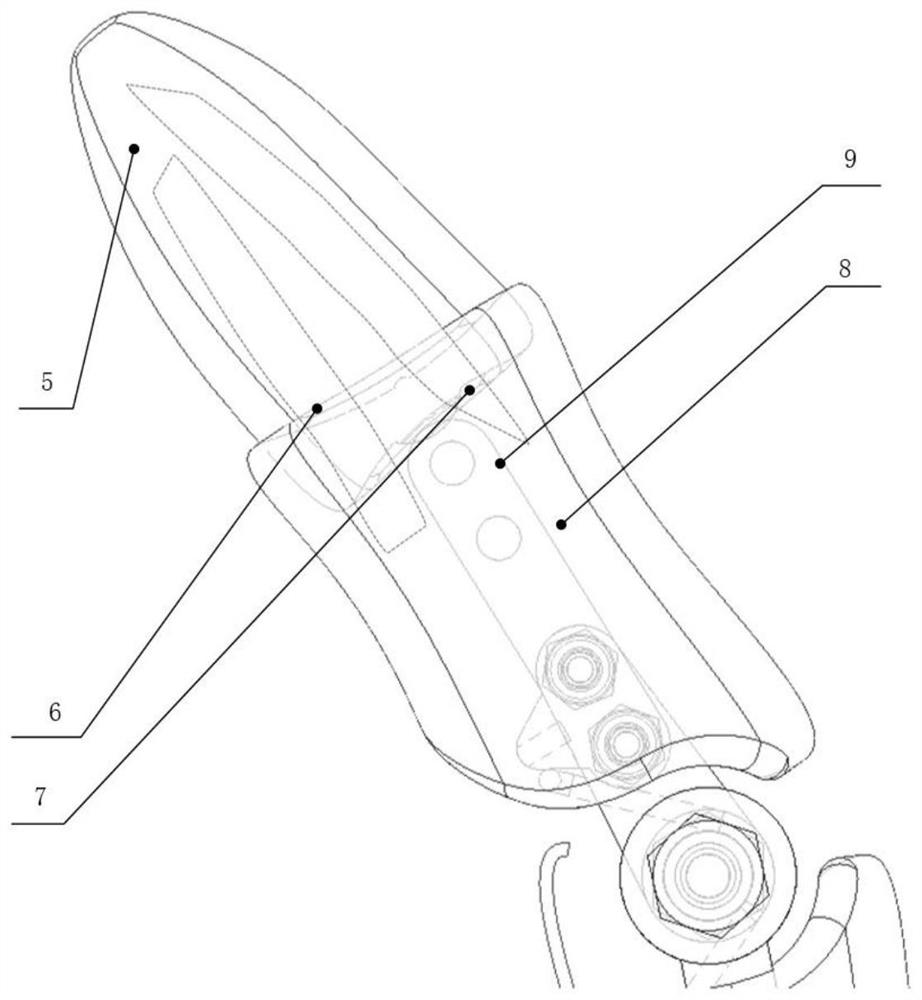
[0024] like figure 1 , figure 2 , image 3 and Figure 4 As shown, a rigid-flexible human-like five-fingered manipulator is designed to include a bionic knuckle (1), a rigid silk-driven joint (2), a bionic palm (4), and the bionic knuckle (1) includes a flexible finger distal segment ( 5), conformal air bag (6), pressurized air bag (7), flexible finger middle segment (8), middle segment rigid p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More