Unmanned aerial vehicle sound source orientation device and method based on rotary cross array
A cross array and orientation device technology, which is applied in the direction of measuring devices, positioning, motor vehicles, etc., can solve the problems of orientation error and inaccurate orientation, and achieve the effect of low cost, small amount of calculation, and phase ambiguity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] Embodiment 1 (UAV sound source directional device)
[0040] This embodiment provides a drone sound source orientation device, which can perform two-dimensional real-time orientation on the position of the drone.
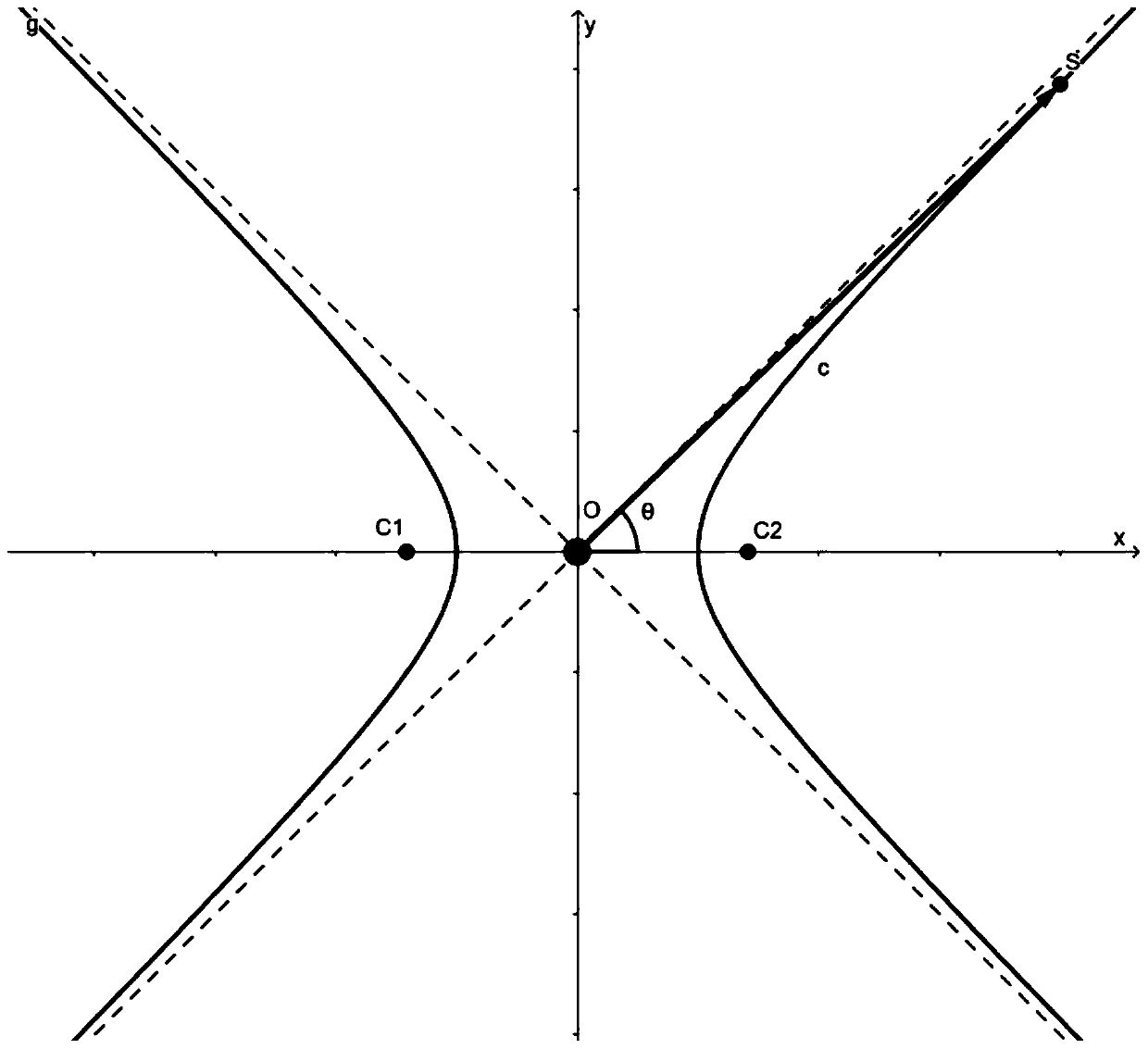
[0041] The principle of this embodiment is: collect the sound pressure signal (original signal) in the time domain generated when the UAV is flying, and perform upsampling and filtering, and obtain the time delay τ by retrieving the peak value of the cross-correlation function 1,2 , using the hyperbolic approximation model to obtain the horizontal deflection angle and pitch deflection angle, and finally the two-degree-of-freedom steering device aligns the cross array containing the microphones to the sound source of the drone.
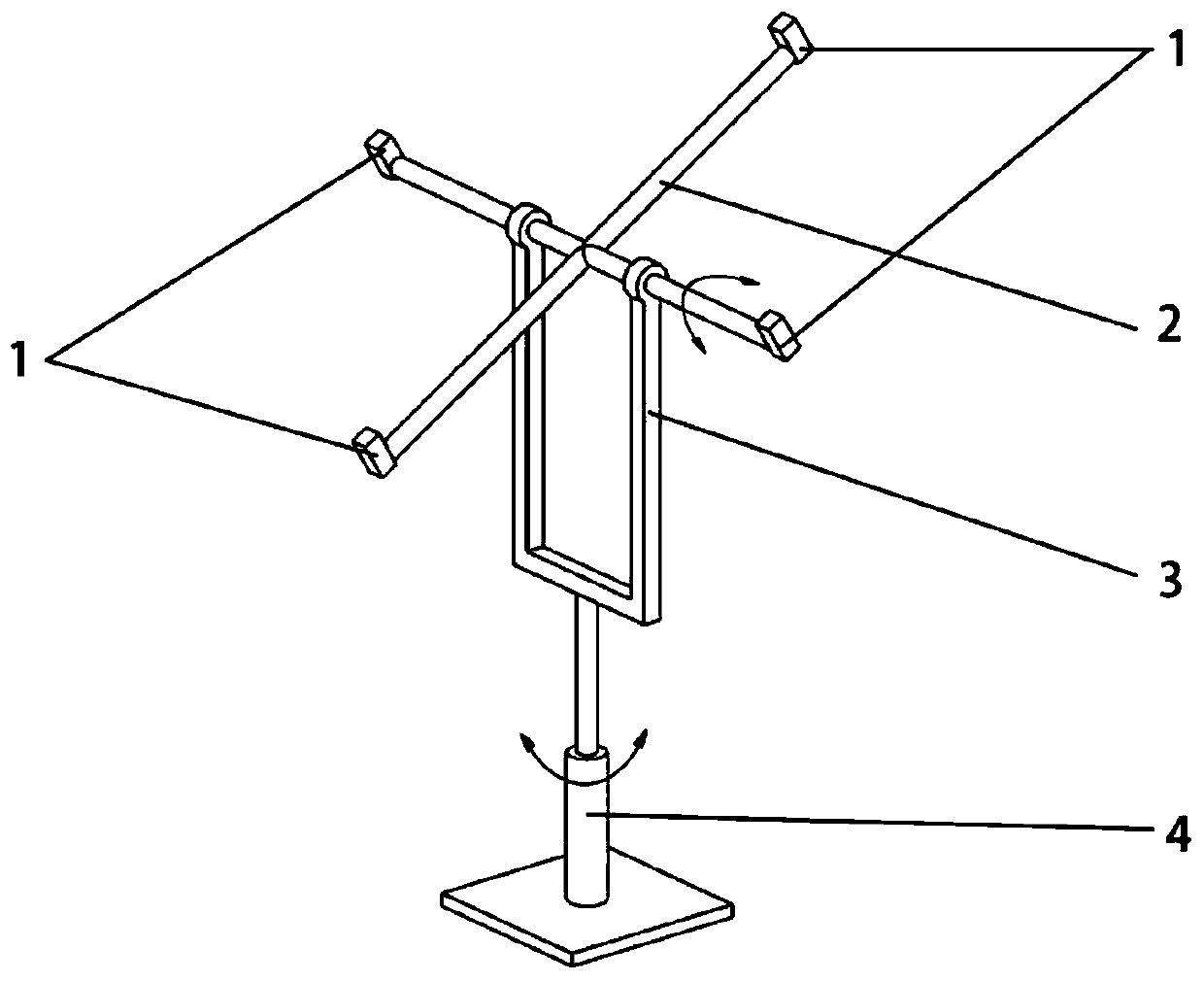
[0042] Such as figure 1 Shown, a kind of unmanned aerial vehicle sound source directional device, it comprises: cross array 2, two groups of microphones 1 (that is four microphones), processing device, two-degree-of-freedom steering d...
Embodiment 2
[0052] Embodiment 2 (UAV sound source orientation method)
[0053] This embodiment provides a method for orienting a sound source of a drone, which uses the device for orienting a sound source of a drone in Embodiment 1 to orient the drone.
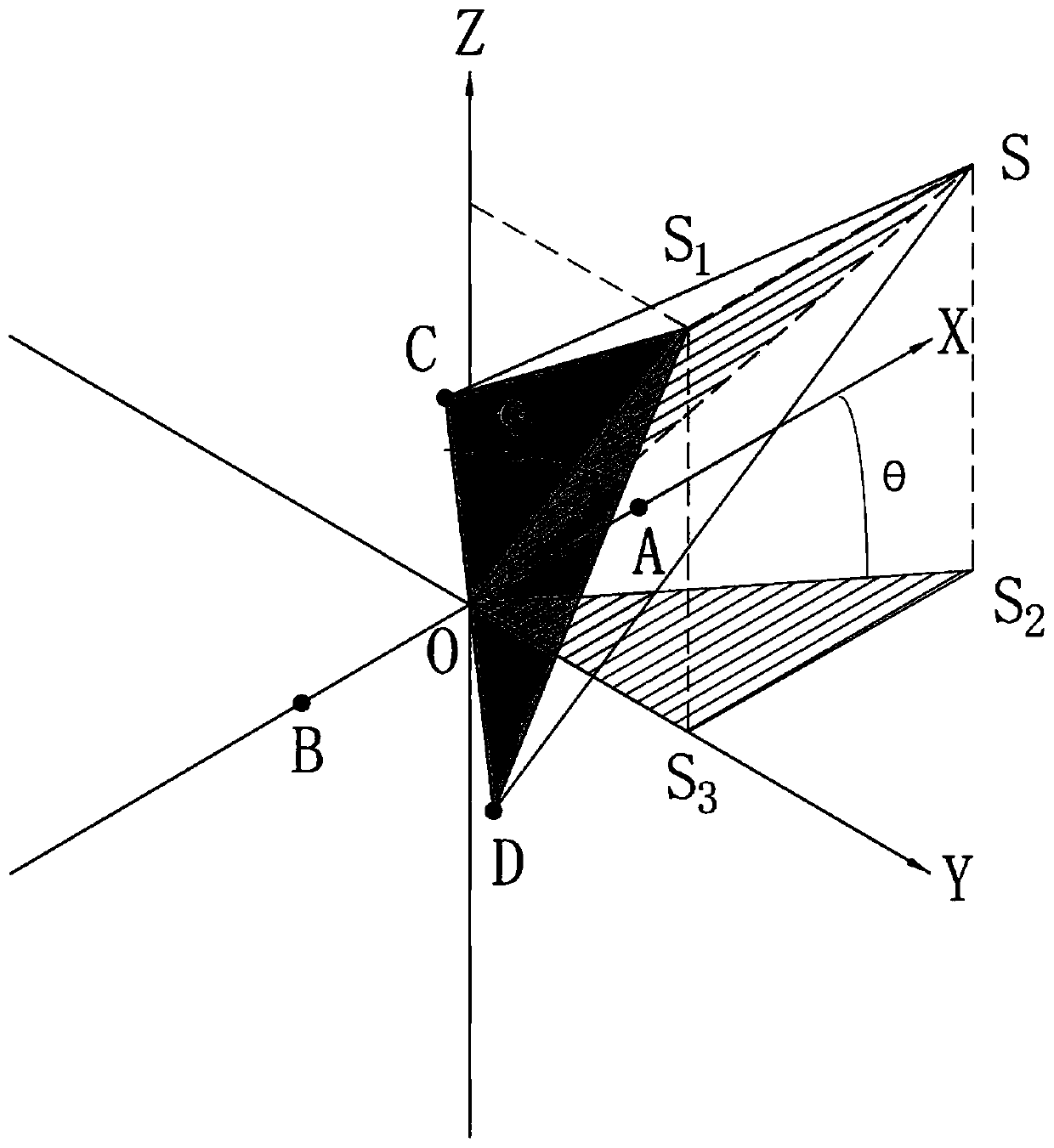
[0054] The principle of this embodiment is as figure 2 shown. Assume that microphone A and microphone B (belonging to one pair of microphones facing each other, set as the first group) are located on the X-axis (the line where AB is located is the X-axis, that is, no matter how the rotating cross rotates, it is always on the line where AB is located) is the X-axis for subsequent calculations), microphone C and microphone D (belonging to another pair of microphones facing oppositely, set as the second group) are located in the YOZ plane (including Y-axis and Z-axis, X-axis, Y-axis and The Z axes are perpendicular to each other, and the origin is O, so microphone C and microphone D can rotate around the X axis in the YOZ plane). The ori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



