

Virtual ultrasound probe tracking method for remote manipulation
An ultrasonic probe and remote technology, applied in the field of ultrasonic remote scanning, can solve problems such as the inability to simulate the doctor's scanning technique, adjust the position and direction of the probe, and solve problems, so as to avoid mathematical solutions, facilitate operation, and increase application scenarios.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
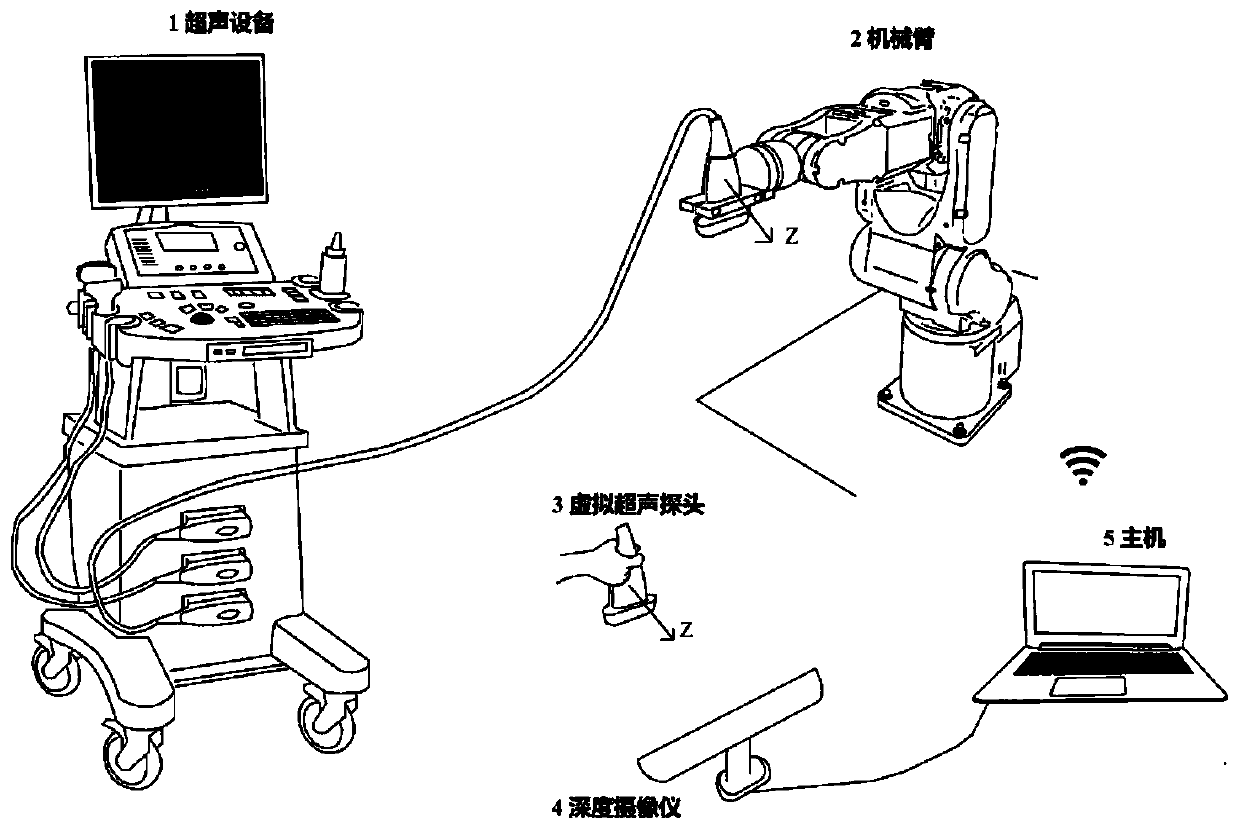
[0028] Such as figure 1 As shown, in this embodiment, the scanning device for remote manipulation includes an ultrasonic scanning device 1 and an actual ultrasonic scanning probe connected thereto, a six-axis robotic arm 2, a depth camera 4, a virtual ultrasonic probe 3 held by a doctor, and a computer 5 ; The six-axis mechanical arm 2 is used to control the movement of the actual ultrasonic scanning probe, and the computer 5 shown is used to obtain the position and direction of the normal vector movement in real time.
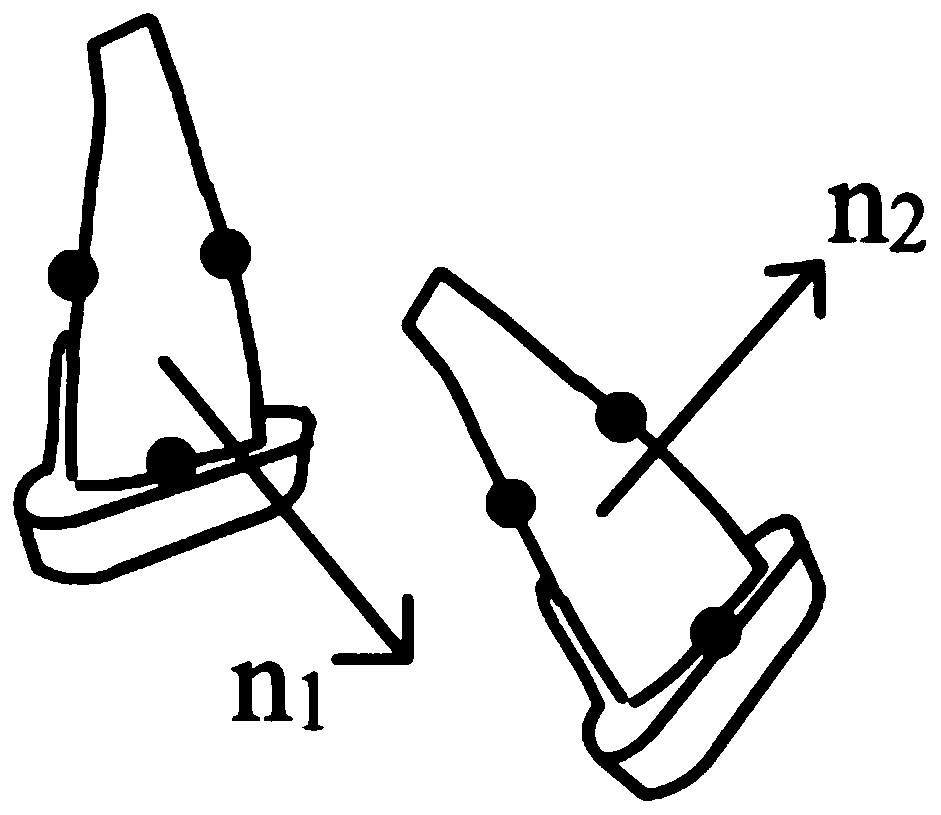
[0029] Such as figure 2 shown, n 1 and n 2 Indicates the normal vector direction of the coronal plane of the virtual probe.
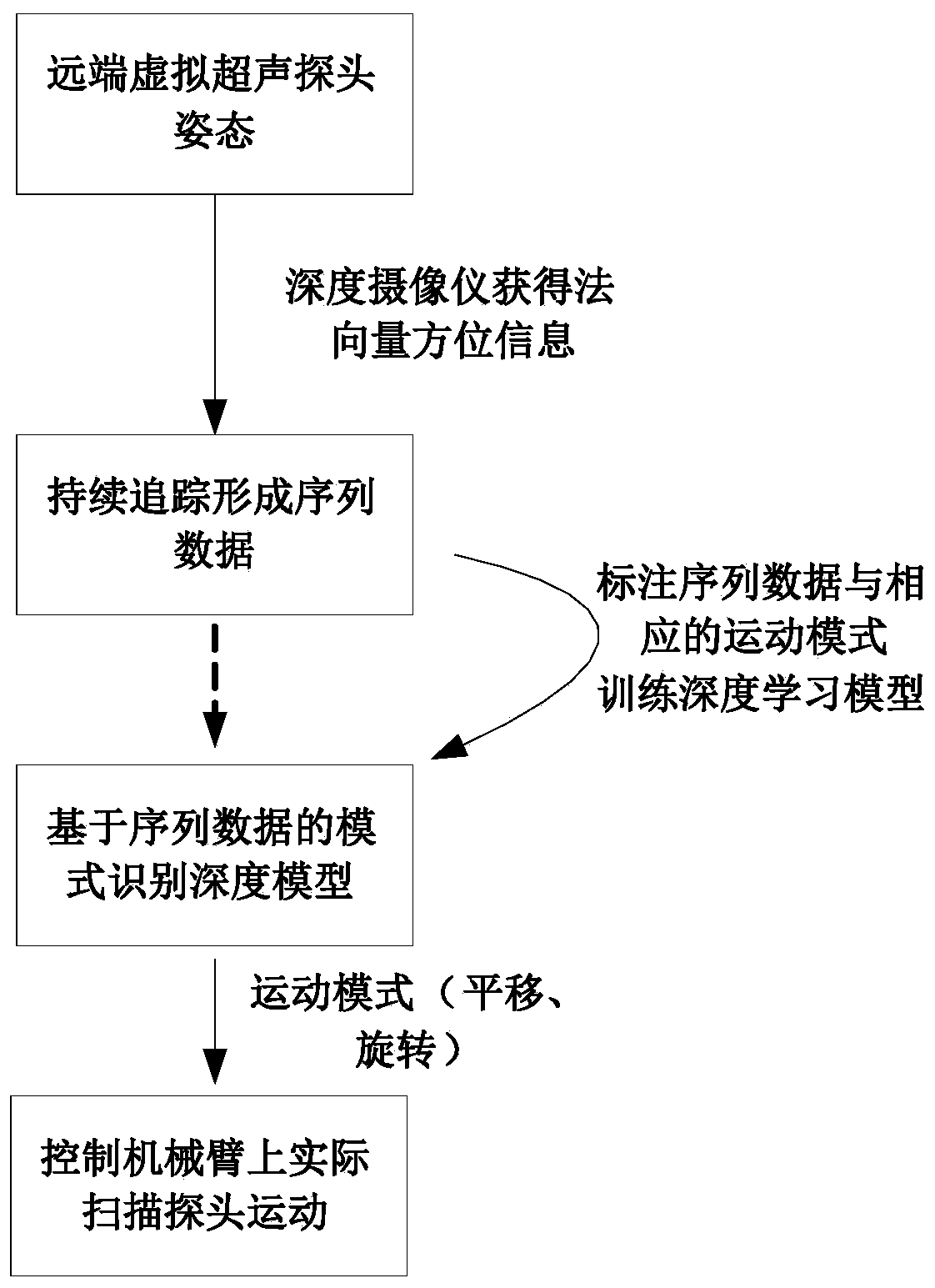
[0030] A virtual ultrasound probe motion tracking method for telemanipulation, such as image 3 shown, including the following steps:
[0031] S1. At the remote end, use the kernel correlation filter algorithm based on the depth camera to track the position changes of the three marker points of the triangle coplanar with the probe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More