

A joint objective function multi-propeller attitude angle acquisition method based on visual projection scale factor set
A scale factor and objective function technology, applied in the interpretation of photos, complex mathematical operations, camera devices, etc., can solve problems such as poor flexibility, difficult measurement accuracy, and increased measurement error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0131] Simulation experiment and analysis
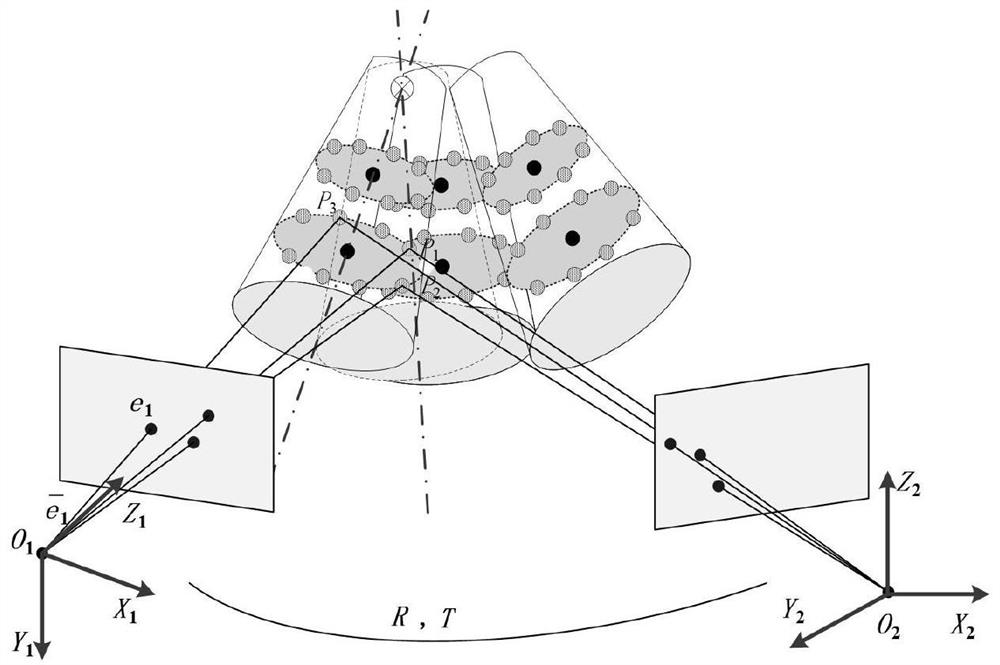
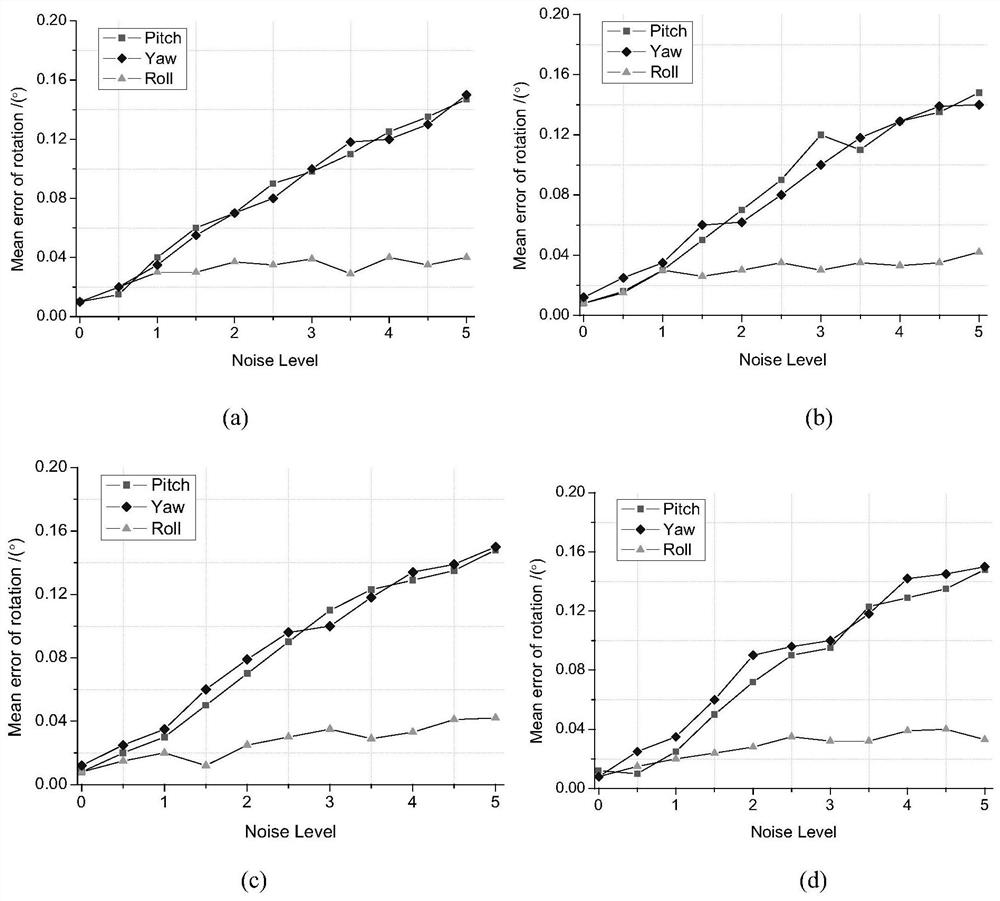
[0132] The algorithm simulation program is executed on the Windows 10 operating system with a CPU frequency of 3.2GHz and 8GB of running memory, and is based on the Matlab 2017b software development platform. The feature points in the world coordinate system are randomly generated and distributed in the range of 4m×4m×4m. The camera simulation parameters are set as follows: focal length f=20mm, radial distortion coefficient k 1 =3.5×10 -4 , k 2 =1.9×10 -5 , the principal point coordinate is c x = 1280 and c y =1240. Set the Euler angles of the initial state to [-10°, -10°, 0°] respectively, and the relative translation matrix T between multiple propellers 11 =[0,0,0]',T 21 =[0,300,0]', T 31 =[300,300,0]',T 41 =[300,0,0]', the distance unit is mm. Firstly, the influence of noise on the measurement accuracy of thruster attitude angle is analyzed. Gaussian noise with mean zero and standard deviation σ distributed from 0 to 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More