

Unmanned aerial vehicle autonomous positioning method based on heterogeneous image matching and inertial navigation fusion
A heterogeneous image and inertial navigation technology, which is applied in surveying and mapping, navigation, navigation, navigation computing tools, etc., can solve the problem of reduced positioning accuracy of UAVs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
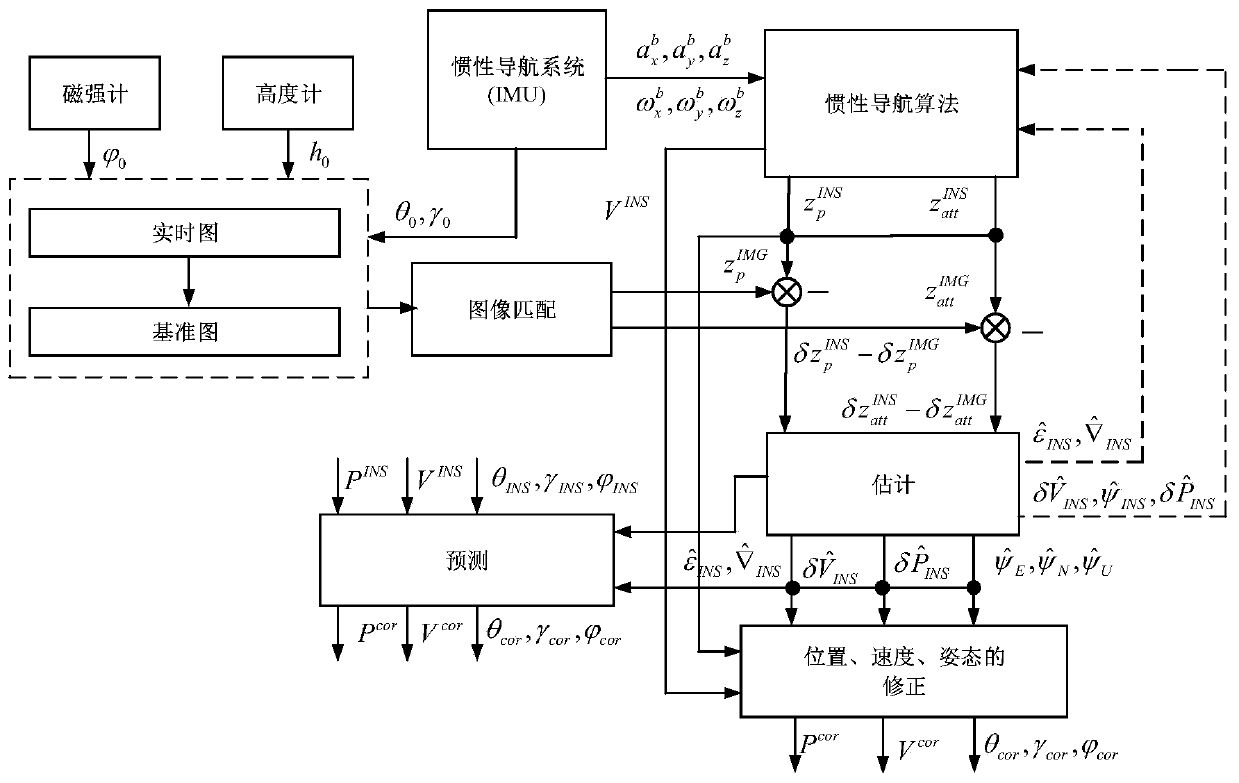
[0072] Embodiment 1 of the present invention provides a UAV autonomous positioning method based on heterogeneous image matching and inertial navigation fusion, comprising the following steps:
[0073] Step 1, use the inertial navigation system to provide the initial attitude θ of the UAV 0 ,γ 0 , the heading angle obtained by the magnetometer The altitude h obtained by the altimeter 0 Apply transformations to real-time graphs.
[0074] Step 2: Match the transformed real-time image with the reference image for heterogeneous images, and then obtain the precise position of the aircraft through PnP pose calculation and absolute attitude
[0075] Step 3, through the inertial navigation algorithm, the acceleration obtained by the accelerometer and the angular velocity obtained by the gyroscope Integrate to get the position of the inertial navigation and gesture
[0076] Step 4, use Kalman filter to establish the system equation of Kalman filter based on the error eq...
Embodiment 2
[0078] Embodiment 2 of the present invention provides a drone autonomous positioning algorithm based on heterogeneous image matching and inertial navigation fusion. The position and attitude of the drone can be obtained through the heterogeneous image matching algorithm, which can be used to correct the inertial navigation of the drone. error.
[0079] The design steps of the correction algorithm are as follows:
[0080] The UAV autonomous positioning scheme based on heterogeneous image matching and inertial navigation fusion mainly includes the following steps:
[0081] (1) The establishment of the state model of heterogeneous image matching / inertial navigation fusion positioning, as follows:
[0082]
[0083] In the formula, X(t) is the above-mentioned system state vector, W(t) is the system white noise, and the system noise F(t) and G(t) are obtained according to the error equation:
[0084]
[0085] Where: ψ n is the attitude error; δV n is the strapdown inertial...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More