

Man-machine collaborative sorting system and method for obtaining grabbing position of robot
A sorting system and human-machine collaboration technology, applied in sorting and other directions, can solve the problems of selected position deviation, deviation, low garbage sorting efficiency, etc., and achieve the effect of improving the grabbing efficiency and avoiding multiple grabs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to describe the content, structural features, goals and effects of the present invention in detail, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described implementation Examples are only some embodiments of the present invention, not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
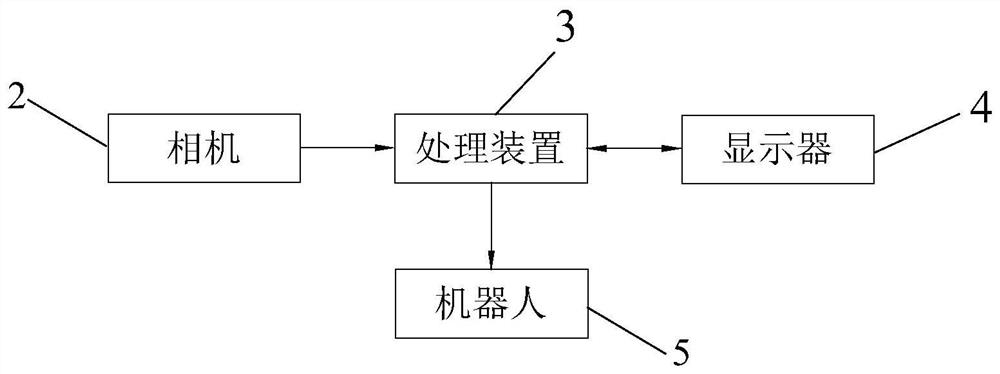
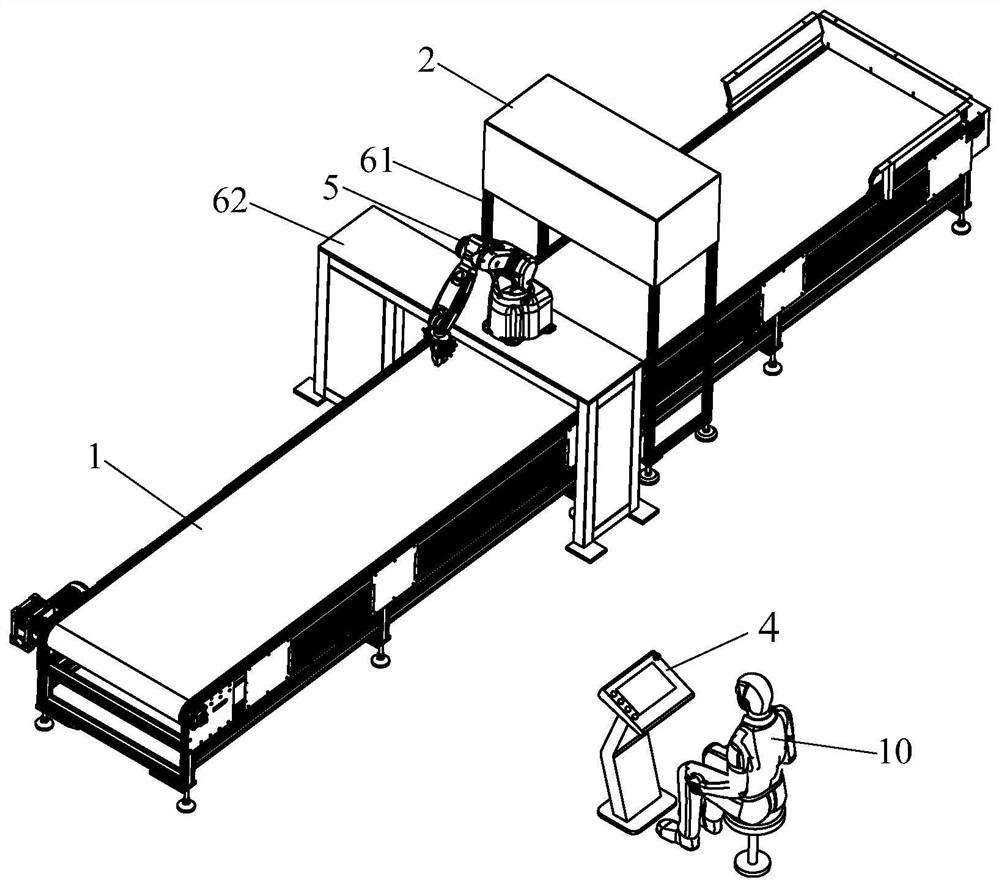
[0029] see figure 2 and image 3 , the present embodiment provides a human-machine cooperative sorting system, including a conveying mechanism 1, a camera 2, a processing device 3 communicatively connected to the camera 2, a display 4 communicatively connected to the processing device 3, and a robot communicatively connected to the pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More